Envíos a
todo el país

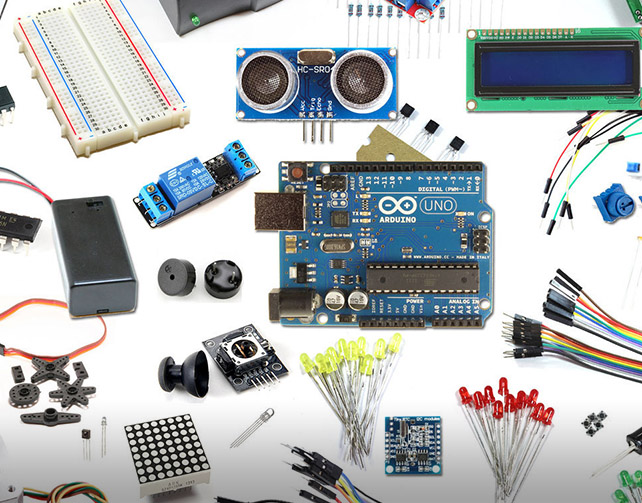
Aprende a trabajar con Arduino la plataforma de desarrollo basada en una placa electrónica de "hardware libre" que incorpora un microcontrolador re-programable.

La domótica es principalmente un conjunto de tecnología que se aplican para lograr que una casa pueda ser inteligente.
Controla el consumo de energía, mejora el uso de la iluminación y mejora la seguridad de tu casa gracias a las herramientas de la domótica
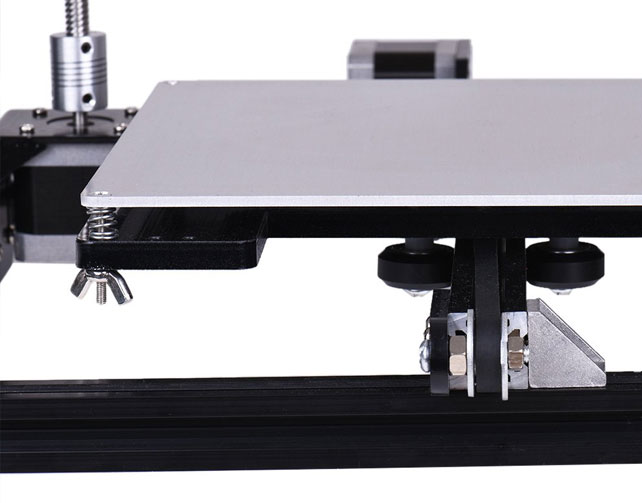
Sácale provecho a la impresión 3D con los upgrades para las impresoras mas populares del mercado.
Piezas re-diseñadas, repuestos, guías y servicie

Tenemos una colección de proyectos con guías paso a paso y hacks para aprender, haciendo.
Kits de robótica educativa segmentada en las distintas edades, etapas de aprendizaje, niveles de complejidad.
El principal objetivo pedagógico es incentivar la creatividad y fomentar la innovación evolutiva.
Suscríbase y reciba nuestras novedades

Con esta guía, aprenderá a fabricar un control remoto universal a partir de un microcontrolador Arduino y un control común de TV.
Controle cualquier dispositivo programando un Arduino para que lea la señal de infrarrojo (IR) proveniente del control remoto de su TV y recupere la utilidad de aquellos dispositivos electrónicos antiguos que carecen de control remoto.
El programa se basa en un receptor de infrarrojos (IR) y el código que recibe de un transmisor de infrarrojos, que en este caso es el control remoto de su televisor. Los transmisores de infrarrojos tienen una frecuencia portadora (Carrier Frecuency) específica, que generalmente es de 38 kHz.
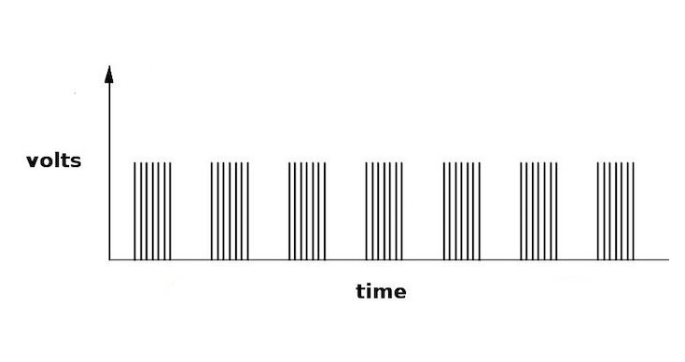
Cada botón en el control remoto de su televisor tiene su propio código digital que enciende y apaga la señal del operador de una manera única.
Con la ayuda del receptor IR, el Arduino puede leer y reconocer cada señal modulada como una acción que se envía de un botón individual. Esto le da la capacidad de controlar tantos componentes como botones haya en su control remoto, o al menos tantos pines como su Arduino tenga.
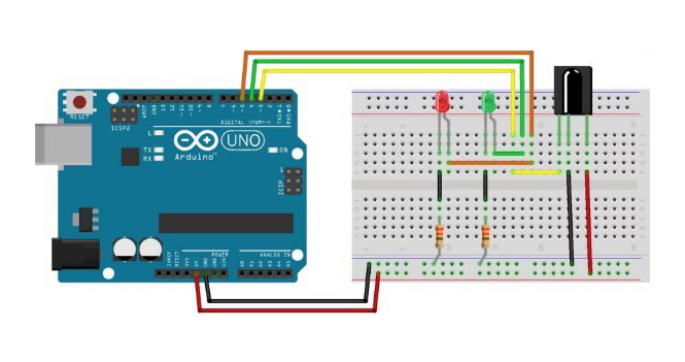
Antes de abrir y compilar el programa principal, use la Demo "IRrecv" y su monitor de serie para leer y decodificar cada botón que planea usar. Tome nota del código asociado con cada botón, luego puede usar esos códigos en la sección #define del programa principal para asignar a cada botón una tarea diferente.
El primer programa utiliza un botón para el encendido dual del LED y otro botón para su apagado. El segundo programa asigna a los LED sus propios botones de encendido separados y el botón de encendido principal apaga ambos LED.
El código hará que tu Arduino haga esencialmente lo siguiente:
Puede descargar cualquiera de las dos versiones del código:
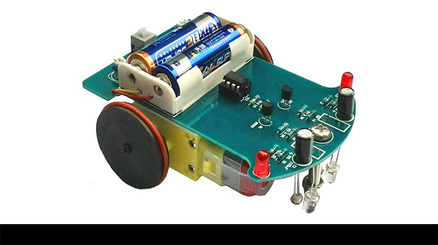
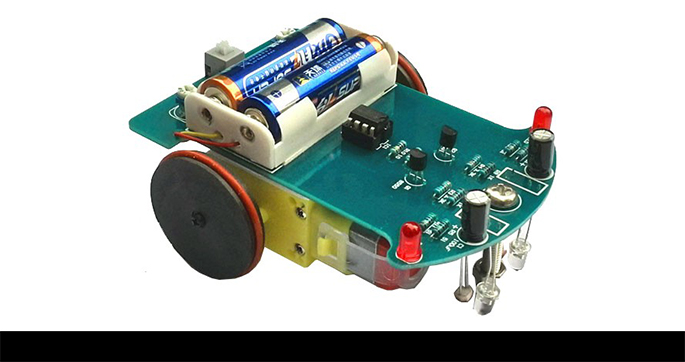
Con esta guía va a poder armar tu propio "Robot Sigue-Linea" en 10 minutos.
Line followers are one of the most prominent kinds of robots. They have existed for a long time, but the technologies used for building them have changed significantly. In earlier versions, controller boards the size of bricks were used, but they have since shrunk and become tremendously powerful. Now, technology allows you to build a line follower in just under 10 minutes if you have the parts for it. Have fun with this quick and easy DIY hacking tutorial!
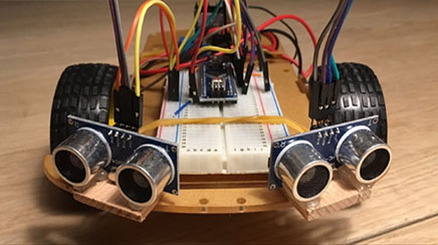
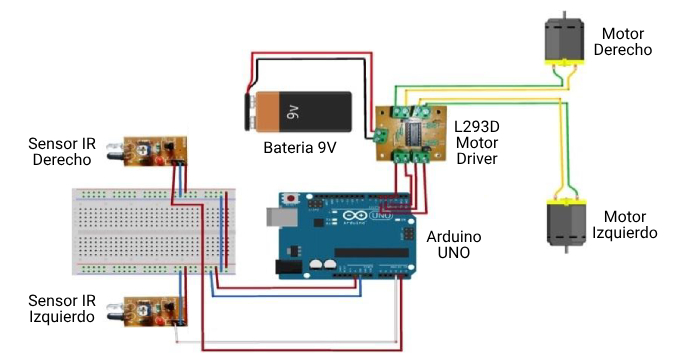
Aprenda cómo conectar motores DC, sensores IR y controladores de motor con un Arduino para hacer un robot que evite obstáculos.
Uno de los proyectos más simples que puede realizar por primera vez con un Arduino es un robot para evitar obstáculos. Si usted es un principiante de Arduino y quiere aprender más sobre él, esta guía le enseñará lo básico mientras construye un robot genial.
Un robot que evita los obstáculos de Arduino detecta cualquier obstrucción en su camino y lo evita al desviarse. La misma acción se puede obtener con mayor precisión utilizando módulos de sensores ultrasónicos y algoritmos basados en PID (proporcional-integral-derivada).
Este concepto incluso se ha utilizado en aspiradoras automáticas.
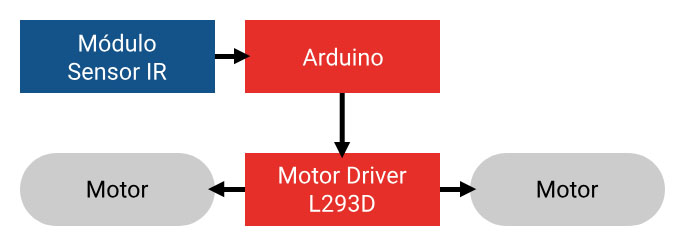
El robot Arduino lee la entrada de los módulos IR a través de los pines analógicos. Dependiendo de los valores recibidos del módulo IR, el Arduino controla los dos motores por separado. De este modo, el robot gira a la izquierda o a la derecha para evitar obstáculos.
El controlador tiene 2 entradas para alimentación, 4 puntos para las entradas de control del motor y 4 puntos para las salidas de control del motor. Es un conjunto de 2 entradas y 2 salidas para cada motor.
Para controlar los motores, conecte los cuatro puntos de control al Arduino y los 4 puntos de salida a los motores. La batería de 9V se puede conectar al controlador mediante los pines de entrada de alimentación. Los puntos de potencia de entrada y salida se indican en la placa.
IR significa infrarrojo, que es una longitud de onda de luz no visible para el ojo humano (pero se puede ver con nuestras cámaras de teléfonos inteligentes). Estos módulos constan de un par de LEDs IR de receptor y transmisor.
Cuando un objeto se pone frente al sensor de infrarrojos, la superficie del objeto refleja una parte de la luz infrarroja hacia el receptor, luego el receptor emite una señal LOW que notifica que un objeto está frente al sensor.
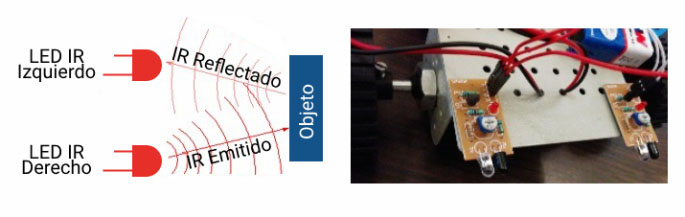
Este robot Arduino utiliza dos módulos de sensores IR que pueden detectar objetos dentro de un rango de 5-6 cm. Este sensor emite una señal digital LOW (0V) cuando hay un objeto dentro de su rango y, de lo contrario, emite una señal digital HIGH (5V).
El controlador de motor L293D IC se utiliza para controlar los dos motores. Se usa un controlador de motor porque un Arduino no puede suministrar suficiente corriente para impulsar el motor. Los pines 2, 3, 4 y 5 en el Arduino entran en la entrada del L293D IC.
Los pines 2 y 3 son las señales de control para el motor derecho y 4 y 5 son las señales de control para el motor izquierdo. Una batería de 9V está conectada al L293D IC para impulsar el motor.
Se conectan +5V y GND (tierra) a ambos sensores IR del Arduino. Las salidas del sensor IR izquierdo y derecho se dan a los pines analógicos 3 y 4 en el Arduino respectivamente. Las lecturas del sensor IR serán valores analógicos.
Cuando un obstáculo obstruya el sensor, el valor analógico de salida será digital LOW. La salida del controlador del motor (L293D) se entrega a los dos motores como se ve en el diagrama.
Compruebe que los sensores IR conectados están funcionando con el Arduino. Para hacer esto, conecte el módulo IR a los pines analógicos de Arduino y verifique los valores recibidos en el monitor de serie. Luego encuentre los valores correspondientes cuando un objeto esté frente al sensor IR.
Puede utilizar este código para verificar los módulos IR y los motores DC:
int value;
void setup(){
Serial.begin(9600);
}
void loop(){
value = analogRead(3);
Serial.print(" Sensor Left = "); // printing the values of both sensors into
Serial.print(value); // serial monitor for inspection
value = analogRead(4);
Serial.print(" Sensor Right = ");
Serial.println(value);
delay(100);
}
Los dos terminales en los motores están conectados a los cuatro terminales de salida en el tablero. Los motores entonces, basados en el comando del Arduino son alimentados por la batería de 9V.
HIGH significa señal de 5V o digital 1 y LOW es señal de 0V o digital 0.
Por ejemplo: digitalWrite (5, HIGH), este comando envía una señal HIGH (digital 1) al pin 5 en el Arduino. Por lo tanto, la dirección de cada motor se puede controlar escribiendo señales HIGH/LOW a través de dos pines digitales en el Arduino.
Realice las conexiones que se muestran en el diagrama de circuito de arriba. Puede intentar crear su propio código o simplemente usar el código que creamos: tutorial de Arduino Robot. Aquí se incluye un código que maneja los obstáculos directamente en frente del robot Arduino y también las esquinas hasta cierto punto.
Cargue el código y realice los cambios necesarios para garantizar un funcionamiento sin problemas y, listo! ha creado su propio robot Arduino!
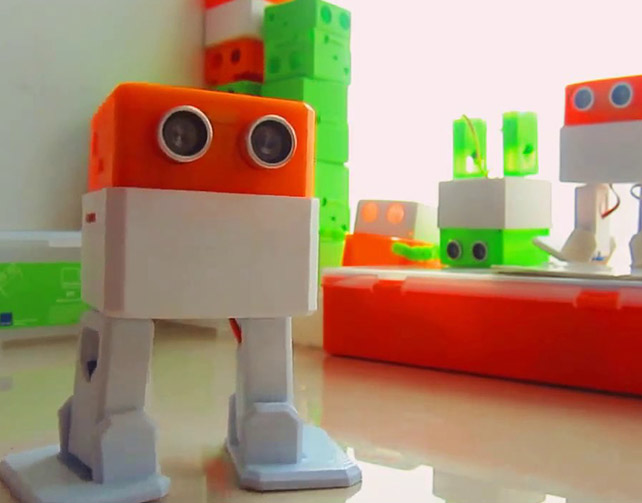
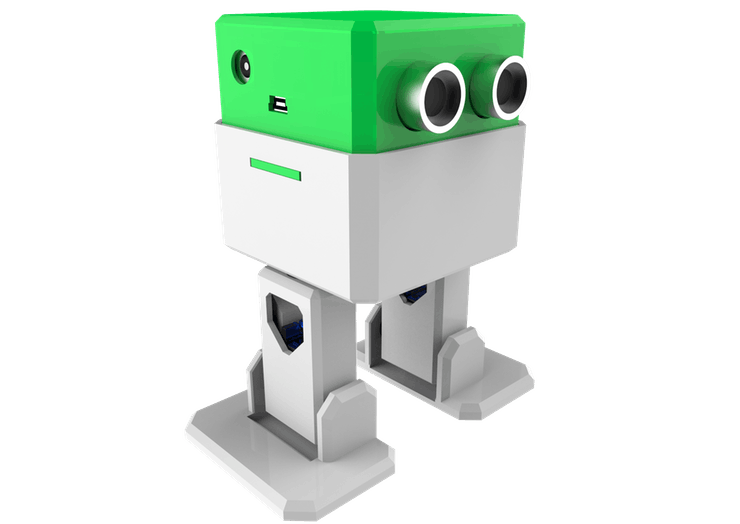
Un robot interactivo que cualquiera puede construir! Muy fácil de imprimir en 3D y montar.
Su estructura fue inspirada en Bob the Biped y su programación se basa en el código de Zowi, que al igual que Otto son robots bípedos de código abierto.
La abreviación DIY vine del inglés Do It Yourself que significa Hágalo Usted Mismo!
Otto camina, baila, hace sonidos y evita obstáculos.
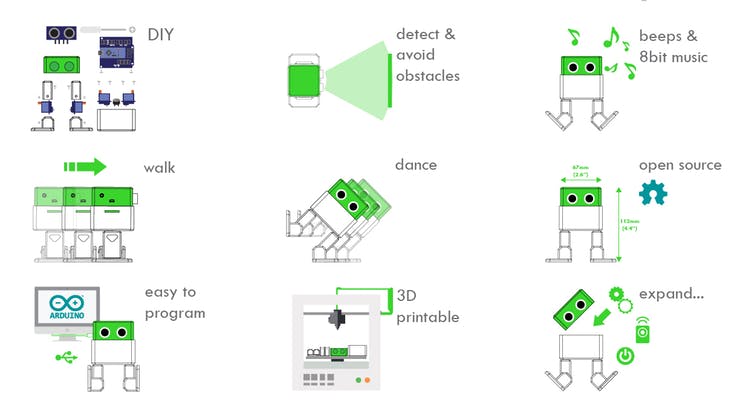
Otto es completamente de código abierto, compatible con Arduino, imprimible en 3D y tiene la misión social de crear un entorno inclusivo para los niños.
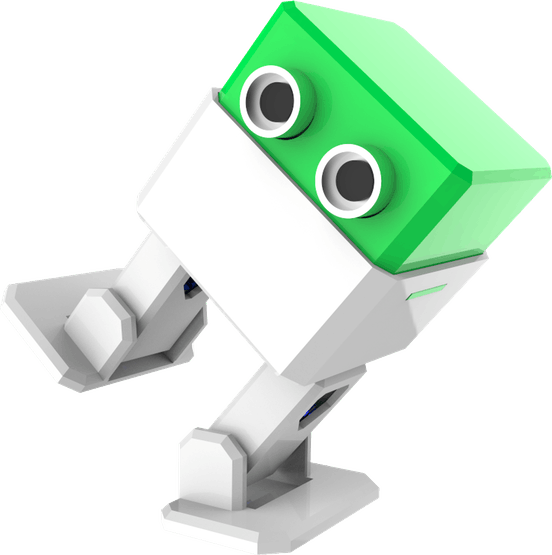
El acto de construir y codificar tu propio Otto creará un vínculo emocional entre tú y él que se convertirá en una amistad duradera.
Las diferencias de Otto están en el tamaño de ensamblado (11 cm x 7 cm x 12 cm) y en la integración de componentes y expresiones.
Con nuestro kit, algunas partes impresas en 3D, conexiones electrónicas simples (casi no requiere soldadura), y habilidades básicas de codificación, usted podrá construir su propio Otto en tan solo una hora o incluso menos.
Otto fue diseñado con Autodesk 123D Design, por lo tanto utilizando el software TinkerCAD usted puede modificarlo, personalizarlo o realizar otras mejoras.
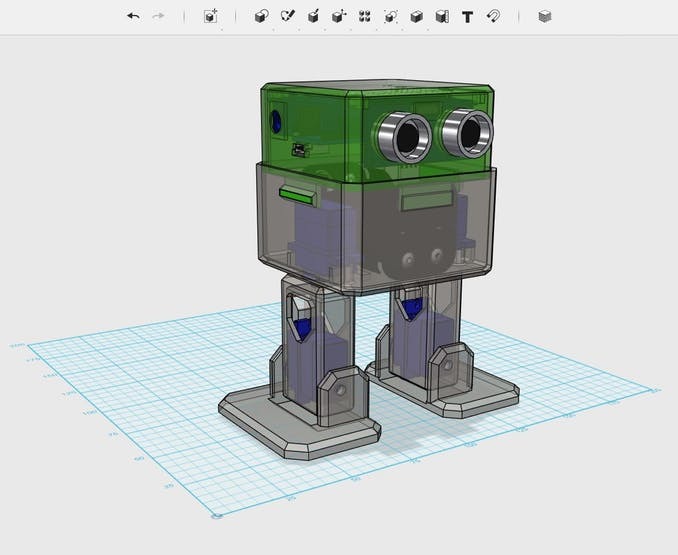

* Si no posee o le resulta difícil obtener las piezas, simplemente puede comprar nuestros kits completos.
Solo necesita imprimir 6 partes:
Otto está muy bien diseñado para la impresión 3D, los archivos que descargó están propiamente orientados y centrados, por lo que no le causarán problemas si respeta los siguientes parámetros.
Después de imprimir, deberá limpiar un poco las áreas de las piernas y los pies que fijan los motores. Para este proceso puede utilizar un Cutter (si la calidad de impresión en 3D es lo suficientemente buena, no es necesario).

OctoPrint es un software libre que hace de servidor y nos permite controlar una impresora 3D por medio de una interfaces web.
Las interrupciones son un mecanismo muy potente y valioso en procesadores y autómatas. Arduino, por supuesto, no es una excepción.
En esta guía veremos qué son las interrupciones, y como usarlas en nuestro código.














Copyright © 2026 - Murky Robot - Todos los derechos reservados