Envíos a
todo el país

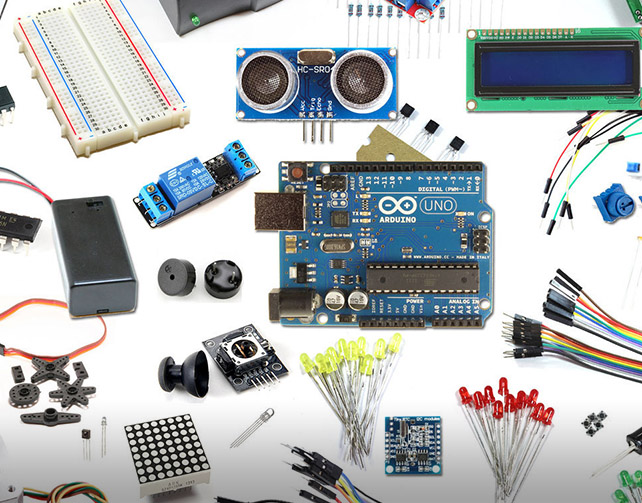
Aprende a trabajar con Arduino la plataforma de desarrollo basada en una placa electrónica de "hardware libre" que incorpora un microcontrolador re-programable.

La domótica es principalmente un conjunto de tecnología que se aplican para lograr que una casa pueda ser inteligente.
Controla el consumo de energía, mejora el uso de la iluminación y mejora la seguridad de tu casa gracias a las herramientas de la domótica
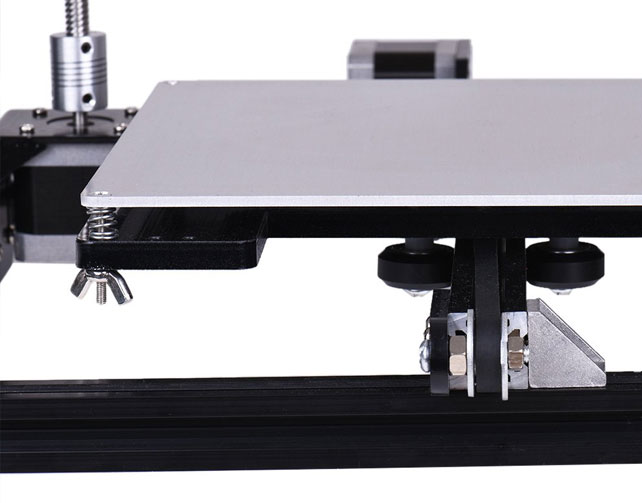
Sácale provecho a la impresión 3D con los upgrades para las impresoras mas populares del mercado.
Piezas re-diseñadas, repuestos, guías y servicie

Tenemos una colección de proyectos con guías paso a paso y hacks para aprender, haciendo.
Kits de robótica educativa segmentada en las distintas edades, etapas de aprendizaje, niveles de complejidad.
El principal objetivo pedagógico es incentivar la creatividad y fomentar la innovación evolutiva.
Suscríbase y reciba nuestras novedades
Guías de consulta rápida sobre electrónica digital, automatización, robótica y domótica.
Las guías de MurkyRobot combina una gran cantidad de información útil del día a día, explicaciones resumidas y orientación práctica para el diseño y la construcción de productos electrónicos digitales.
Esta colección de guías compactas con datos clave y conceptos básicos de circuitos digitales, proporciona una referencia ideal para una amplia gama de estudiantes, entusiastas, técnicos y profesionales de la electrónica que han progresado más allá de lo básico.
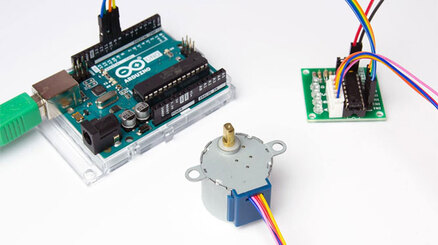
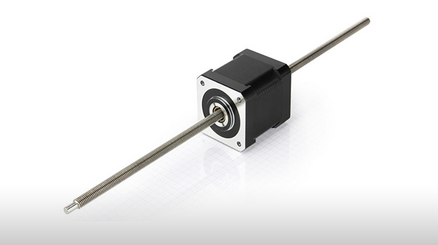
El 28BYJ-48 es uno de los motores paso a paso más baratos que puedes encontrar. Aunque no es súper preciso ni potente, es un gran motor para usar en proyectos más pequeños o si solo quieres aprender sobre motores paso a paso.
Este motor se usa a menudo para ajustar automáticamente las paletas de una unidad de aire acondicionado. Tiene una caja de reducción incorporada, que le da un par extra y reduce drásticamente la velocidad.
A continuación puede encontrar las especificaciones para el motor paso a paso y el controlador que se utilizan en este tutorial.
| Voltaje nominal | 5 V |
| Resistencia de la bonina | 50 Ohms |
| Bobina tipo | Unipolar |
| Diámetro - eje | 5.00 mm |
| Longitud - eje y rodamiento | 10 mm |
| Características | Eje aplanado |
| Tamaño / dimensión | 28.00 mm |
| Caja de Reducción | 1/64 |
| Angulo de paso | Modo de medio paso (recomendado): 0.0879° Modo paso completo: 0.176° |
| Pasos por revolución | Modo de medio paso: 4096 (see note) Modo paso completo: 2048 |
| Terminales de conexión | Cables con conector |
| Tipo de motor | Motor de imán permanente |
| Numero de fases | 4 |
Para obtener más información, puede consultar la hoja de datos:
28byj48 -
ULN2003
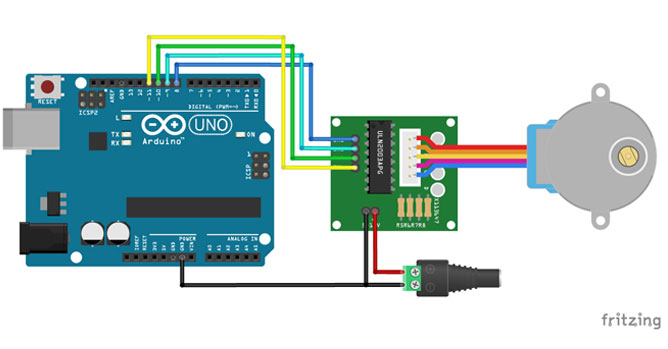
El diagrama de cableado muestra cómo conectar la placa del controlador ULN2003 al motor paso a paso 28BYJ-48 y al Arduino. Las conexiones también se dan en la tabla a continuación.
Código de ejemplo básico de Arduino para controlar un motor paso a paso 28BYJ-48
Puede cargar el siguiente código de ejemplo en su Arduino utilizando el IDE de Arduino.
Este ejemplo usa la biblioteca Stepper.h, que viene preinstalada con el IDE de Arduino. Este scketch gira el motor paso a paso 1 revolución en una dirección, hace una pausa y luego gira 1 revolución en la otra dirección.
#include <Stepper.h>
// Define el número de pasos por rotación:
const int stepsPerRevolution = 2048;
// Conexiones:
// Pin 8 a IN1 en el driver ULN2003
// Pin 9 a IN2 en el driver ULN2003
// Pin 10 a IN3 en el driver ULN2003
// Pin 11 a IN4 en el driver ULN2003
// Crea un objeto paso a paso llamado 'myStepper', tenga en cuenta el orden de los pines:
Stepper myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
myStepper.setSpeed(5); // Establecer la velocidad a 5 rpm:
Serial.begin(9600); // Comienza la comunicación en serial para debug
}
void loop() {
// revolución en una dirección:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500); // Pausa de 500 mseg
// revolución en sentido inverso:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500); // Pausa de 500 mseg
}
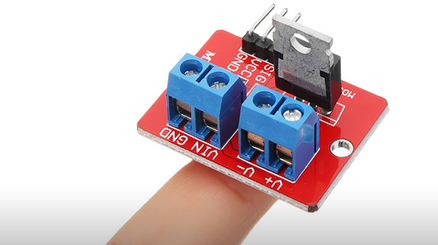
El IRF520N es un modelo muy común de transistor MOSFET que podemos emplear para alimentar cargas a tensión e intensidad superiores a las que podemos proporcionar con las salidas de Arduino.
A los transistores MOSFET se los puede usar del modo "corte y saturación" para formar un interruptor controlado por corriente, con el que controlar grandes cargas.
No todos los MOSFET son apropiados para su uso directamente con una salida de Arduino, dadas sus las limitaciones de tensión y corriente. El IRF520N no es el transistor MOSFET más indicado para emplear con Arduino.
La mayor ventaja del IRF520N es que existen placas comerciales que simplifican significativamente el montaje. Estas placas incluyen resistencias integradas, pines para conectar a Arduino y borneras para conectar la carga.

Incorporar este tipo de placas con IRF520N en proyectos no resulta difícil, solo necesita tener claro que es cada componente y cuál es su función.
Existen dos partes diferenciadas.

En la fase primaria, simplemente conectamos la alimentación Vcc y GND de la placa a los pines 5V y GND de Arduino, respectivamente. Finalmente, conectamos el pin de señal a una salida digital o analógica de Arduino.
En el secundario, conectamos la carga a el borne de conexión indicada. En el otro borne conectamos la fuente de alimentación externa que alimentará la carga, con una tensión máxima de 24V.
Al usar varias fuente de tensión recordar poner siempre en común todos los GND. De lo contrario podríais dañar algún componente.
La conexión, vista desde Arduino, sería la siguiente, donde se ha representado la salida D9, pero podríamos haber elegido cualquier otra salida de Arduino.

Cuando la salida de Arduino se ponga a HIGH, la carga quedará conectada a la fuente de alimentación externa. Arduino solo tendrá que proporcionar la intensidad suficiente para saturar el MOSFET en los cambios de estado.
De esta forma, el IRF520N está comportándose de forma similar a un interruptor que nos permite encender o apagar la carga, y cuyo estado e controlado por la salida de Arduino.
Los códigos de ejemplo son sencillos. Cualquier códigos que utilice salidas digitales o salidas analógicas funcionaran con este montaje.
Por ejemplo, el siguiente código simplemente enciende y apaga la carga en intervalos de 5 segundos.
const int pin = 9;
void setup() {
pinMode(pin, OUTPUT); //definir pin como salida
}
void loop(){
digitalWrite(pin, HIGH); // poner el Pin en HIGH
delay(5000); // esperar un segundo
digitalWrite(pin, LOW); // poner el Pin en LOW
delay(5000); // esperar un segundo
}
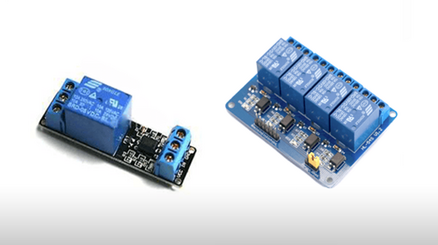
Un relé es un dispositivo electromecánico que permite a un procesador controlar cargas a un nivel tensión o intensidad muy superior a las que su electrónica puede soportar.
Por ejemplo, con una salida por relé podemos encender o apagar cargas de corriente alterna a 220V e intensidades de 10A, lo cual cubre la mayoría de dispositivos domésticos que conectamos en casa a la red eléctrica.
Las salidas por relé son muy frecuentes en el campo de la automatización de procesos, y casi todos los autómatas incluyen salidas por relé para accionar cargas como motores, bombas, climatizadores, iluminación, o cualquier otro tipo de instalación o maquinaria.
Físicamente un relé se comporta como un interruptor "convencional" pero que, en lugar de accionarse manualmente, es activado de forma electrónica. Los relés son aptos para accionar cargas tanto de corriente alterna como continua.
Al ser dispositivos electromecánicos que requieren el movimiento de componentes interno para su funcionamiento el tiempo de conmutación de un relé es elevado, del orden de 10ms.
Como consecuencia los relés no pueden usarse con una señal PWM, ni otro tipo de señales de frecuencia media-alta. En caso de tener está necesidad deberéis usar otro dispositivo, como un transistor BJT, un MOSFET o relés de estado sólido, en función de las características de vuestro proyecto.
La vida útil del dispositivo está determinada por el número de conmutaciones. Sin embargo, típicamente es del orden de 100.000 a 1.000.000 de conmutaciones por lo que en un uso normal son componentes duraderos y fiables.
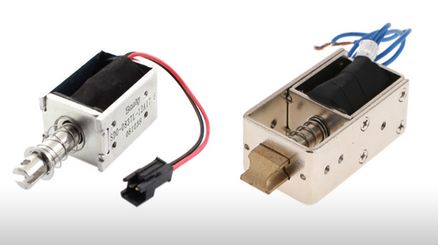
El circuito primario de un relé, que recibe la señal de la electrónica de baja tensión, está formado por una bobina arrollada a un núcleo metálico, formando un electroiman.
El circuito secundario, encargado de alimentar la carga, está formado por unos contactos eléctricos instalados en láminas de metal flexible.
Todos los elementos están fijados a una base aislante y rodeados de una envolvente, que impiden que exista el contacto eléctrico entre los distintos terminales o con el exterior.
De estos contactos uno o dos son contactos fijos, mientras que el restante es un contacto móvil encargado de cerrar el circuito con uno de los contactos fijos.
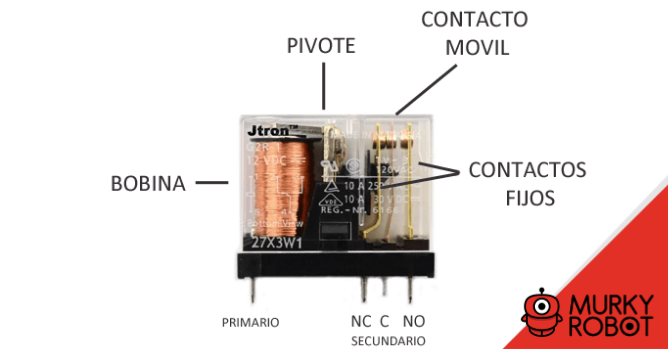
Los relés normalmente disponen de tres contactos en el secundario C (común), NO (normalmente abierto) y NC (normalmente cerrado). Pero también encontramos modelos que prescinden del terminal NC.
En caso de usar una placa comercial el montaje es realmente sencillo. En primer lugar alimentamos la electrónica del módulo Vcc y GND a Vcc y GND de Arduino mediante los terminales existentes.
Por otro lado conectamos la carga a la bornera de tres conexiones. Siempre debemos conectar uno de los polos de la carga al terminal C, que habitualmente es el terminal del medio.
El otro polo de la carga lo conectaremos al terminal NO o NC, dependiendo de si cuando el relé este desactivado queremos que el secundario este abierto (NO), o cerrado (NC).
Finalmente conectamos el pin de señal a una salida digital de Arduino. Si empleamos una placa con varios canales, conectaríamos cada uno de los canales directamente a una salida digital.

El código para controlar un relé es sencillo, y solo necesitamos controlar cualquier salida digital tal, la cual esta conectada al modulo.
Por ejemplo, el siguiente código simplemente enciende y apaga la carga en intervalos de 10 segundos.
const int pin = 9;
void setup() {
Serial.begin(9600); //iniciar puerto serie
pinMode(pin, OUTPUT); //definir pin como salida
}
void loop(){
digitalWrite(pin, HIGH); // poner el Pin en HIGH
delay(10000); // esperar un segundo
digitalWrite(pin, LOW); // poner el Pin en LOW
delay(10000); // esperar un segundo
}
El objetivo de esta guía es listar de forma sencilla cómo funcionan cada actuador lineal con sus ventajas y desventajas.
En otra guía hemos visto los tipos de motores rotativos que que tenemos disponibles, con sus ventajas y desventajas.
Un electroimán es un dispositivo que permite atraer objetos ferromagnéticos, como el Hierro (Fe) y algunas de sus aleaciones.
Un electroimán está formado por una bobina arrollada en torno a un núcleo ferromagnético. Al aplicar una corriente a la bobina se genera un campo magnético en su interior, que genera una fuerza de atracción o repulsión sobre otros materiales.

El núcleo ferromagnético del electroimán aumenta la potencia del campo magnético, y reduce las pérdidas por dispersión.
Podemos usar un electroimán en nuestros proyectos para crear una pequeña grúa, o instalado en un brazo robótico para levantar objetos, o incluso para fijar un robot a una plancha metálica.

Los motores sin escobillas funcionan debido a un campo magnético generado en su interior, el cual se crea a partir de sus 3 bobinas que para ser excitadas, se tiene que dar con el ancho de pulso exacto en cada una para lograr un giro completo.
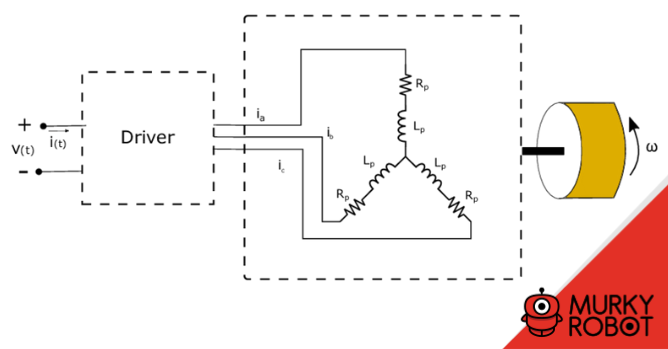
Para controlar un motor de este tipo Arduino envía información al ESC (control electrónico de velocidad) quien se encarga de enviar los pulsos de excitación a cada una de las bobinas.
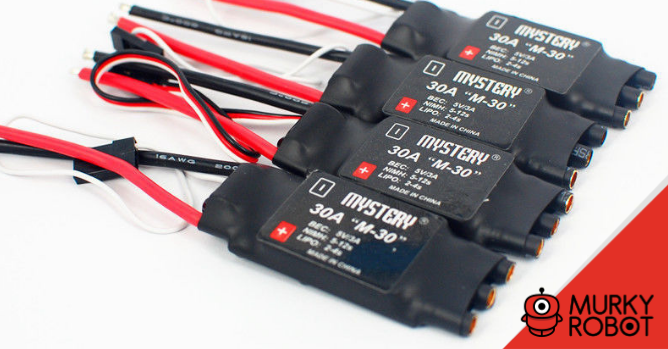
El ESC utiliza señales como si quisiéramos controlar un servo normal. Estas señales son cuadradas con un tiempo en alto que varían entre 1 y 2 milisegundos, que correspondería a un ángulo de entre 0 y 180 grados.
Estas señales son cuadradas con un tiempo en alto que varían entre 1 y 2 milisegundos, que correspondería a un ángulo de entre 0 y 180 grados.
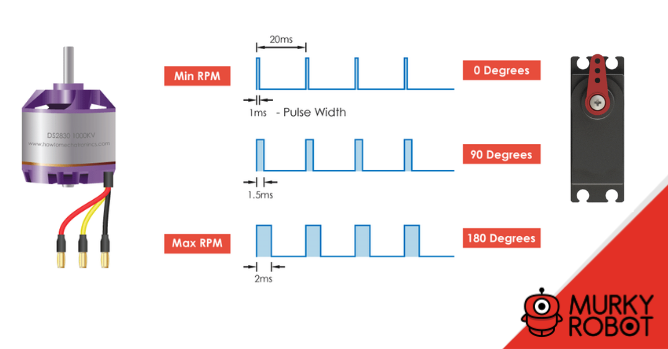
Un Solenoides ó "Actuador Electromagnético" es un dispositivo capaz de generar movimiento lineal directamente, sin necesidad de emplear mecanismos o engranajes.
Un Solenoides está constituido por una bobina junto con un perno central (ferro magnético) siendo ambos elementos independientes entre sí.
Cuando se le da energía a la bobina, esta genera un campo magnético que atrae al perno central provocando su desplazamiento.
Habitualmente se dispone de un resorte entre el cuerpo de la bobina y el perno central, de forma que este vuelve a su posición original al cesar la corriente.
La tensión de alimentación dependerá del tamaño del actuador, siendo populares en: 5V, 12V y 24V.
El consumo varía desde 100mA para los Solenoides más pequeños, hasta 1-2A en modelos más grandes.
Los Solenoides tienen la ventaja de realizar movimientos rápidos y ser muy sencillos de manejar y mantener, ya que carecen de partes móviles (más allá del propio perno central).
Por el contrario, el alcance es limitado típicamente en el rango de unos pocos milímetros (4-60 mm según modelos). La fuerza que pueden ejercer va desde los gramos-fuerza, hasta los modelos más grandes capaces de ejercer unos pocos kilogramos-fuerza
La fuerza ejercida por el Solenoides no es lineal, es decir, el Solenoides ejerce menos fuerza cuando el perno central está extendido, que cuando el perno central está cerca de su posición final.
Otra desventaja es que, por supuesto, no se dispone de ningún tipo de control sobre la velocidad o la posición del perno. Simplemente podemos tirar o empujar una carga.
Por sus características son empleados en "cerraduras electrónicas", "puertas de seguridad", "válvulas electrónicas".
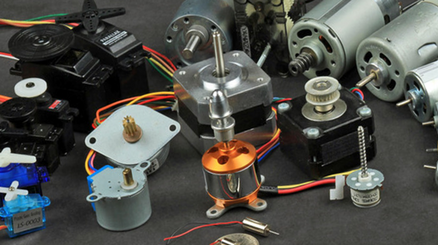
Los motores de corriente continua (motores DC) son unos de los actuadores más comunes. Su funcionamiento se basa en el alineamiento de dos campos magnéticos.
Los motores de corriente continua se encuentran disponibles en distintas tensiones nominales, siendo habituales 6V, 12V y 24V. En cuanto a potencia, encontramos motores de todo tipo de tamaños, desde apenas unos milímetros de largo hasta

Los motores tienen altas velocidades de giro y bajo bajo par. Podemos emplear las salidas PWM de Arduino para controlar la velocidad, pero esto mantendrá el par máximo disponible. Otra opción es emplear un reductor externo o integrado (Motores con Reductor) que reduce la velocidad a la vez que aumenta el par y la precisión.
Los motores DC tienen mal control de posición y mal control de la velocidad. Su comportamiento es fuertemente no lineal y depende mucho de la carga que soportan. Por este motivo suelen emplearse con un encoder que permite saber la posición del eje. Incluso algunos modelos de motores DC integran un encoder internamente.

Los Servomotores por su facilidad de uso son ampliamente empleados en proyectos de robótica, como brazos robóticos, robots con patas, controlar el giro de torretas, u orientar sensores como sensores de ultrasonidos o sensores de temperatura a distancia.
Un servo es un tipo de accionador ampliamente empleado en electrónica. A diferencia de otros tipos de motores en los que controlamos la velocidad de giro, en un servo indicamos directamente el ángulo deseado y el servo se encarga de posicionares en este ángulo.
Típicamente los servos disponen de un rango de movimiento de entre 0 a 180º. Es decir, no son capaces de dar la vuelta por completo (de hecho disponen de topes internos que limitan el rango de movimiento)
Internamente un servo frecuentemente consta de un mecanismo reductor. Por tanto proporcionan un alto par y un alto grado de precisión (incluso décimas de grado). Por contra, las velocidades de giro son pequeñas frente a los motores de corriente continua.
Los servos se admiten una tensión de alimentación entre 4,8V a 7,2V, siendo el valor más adecuado es 6V. Con tensiones inferiores el motor tiene menos fuerza y velocidad. Con tensiones superiores a 6,5V los servos empiezan a oscilar demasiado, lo cual los hace poco útiles.
Internamente un servo está constituido por un motor de corriente continua, acoplado a un reductor para reducir la velocidad de giro, junto con la electrónica necesaria para controlar su posición.

Frecuentemente simplemente se dispone de un potenciómetro unido al eje del servo, que permite al servo para conocer la posición del eje. Esta información es tratada por un controlador integrado que se encarga de ajustar actuar sobre el motor para alcanzar la posición deseada.
La comunicación de la posición deseada se realiza mediante la transmisión de un señal pulsada con periodo de 20ms. El ancho del pulso determina la posición del servo.

La relación entre el ancho del pulso y el ángulo depende del modelo del motor.
Por ejemplo, algunos modelos responden con 0º a un pulso de 500 ms, y otros a un pulso de 1000 ms
En general, en todos los modelos:
Por tanto, variando la señal en microsegundos podemos disponer de una precisión teórica de 0.18-0.36º.
La librerías estándar vienen preinstaladas en el IDE de Arduino. La forma más fácil de saber cuales son consultar al sitio oficial de Arduino.
Estas librerías no se incluyen como opción por defecto en tus sketches, tienes que cargar las que vayas a utilizar de a una. De esta manera se utilizan los recursos de memoria del Arduino con mayor eficiencia al cargar únicamente aquellas librerías que van a ser utilizadas.
Para incluir un librería basta con añadir una declaración #include al comienzo del sketch.
Por ejemplo, si quieres incluir la librería de cristal líquido, que se utiliza para exhibir datos en una pantalla LCD, basta con incluir la siguiente declaración al principio de tu sketch:
#include <LiquidCrystal.h>
Observa que el nombre de la librería tiene que ir limitado por los corchetes menor/mayor: < y >. Además hay que notar que la línea no termina con un punto y coma (;) como es la norma en las demás líneas de código.
A continuación veremos las diferentes librerías estándar.
loremSolución de problemas frecuentes con Arduino
Los rebotes son las falsas pulsaciones (ruido) que se producen al hacer falsos contactos en el interruptor. El proceso de eliminarlos se llama "Debounce".
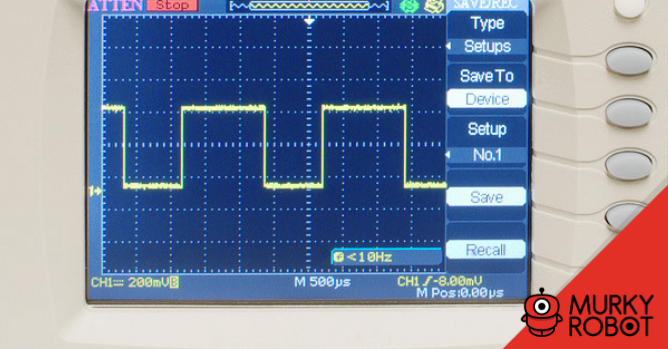
Los dispositivos electrónicos al cambiar de estado generan una señal que, sin ser perfectamente cuadrada, en general es más o menos "recta". Veamos, por ejemplo, la señal que genera Arduino al cambiar el estado de una salida digital de HIGH a LOW.
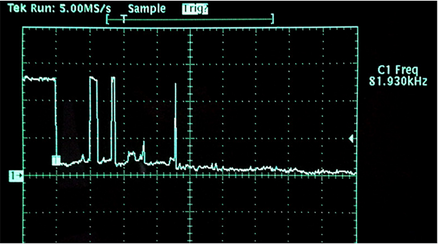
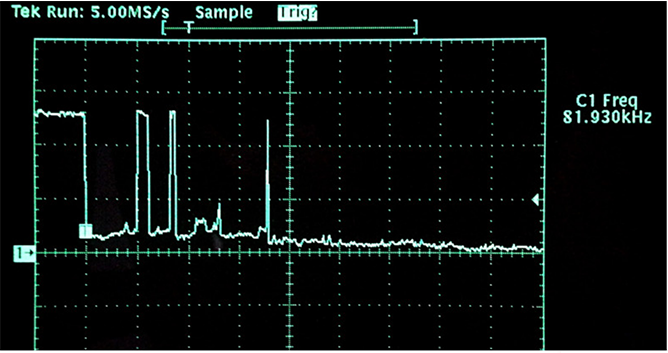
Sin embargo el entorno real muchos dispositivos físicos habitualmente generan ruido en los flancos de señal. Como ejemplo, veamos la variación de tensión que ocurre cuando el cambio de estado se genera por un pulsador.
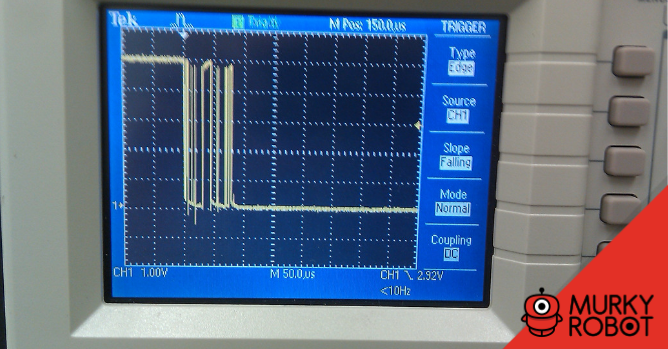
Observar la cantidad de ruido ocurrido tras el cambio de estado. En esencia, en el rango de unos micro-segundos la señal es puro ruido. Todos esos picos pueden provocar disparos múltiples de una interrupción.
Las interrupciones son un mecanismo muy potente y valioso en procesadores y autómatas. Arduino, por supuesto, no es una excepción.
En esta guía veremos qué son las interrupciones, y como usarlas en nuestro código.
Para entender la utilidad y necesidad de las interrupciones, supongamos que tenemos conectado a Arduino: "encoder óptico" que cuenta las revoluciones de un motor, un "sensor de líquidos" que emite una alarma de nivel de agua en un depósito, y un pulsador de parada.
Si queremos detectar un cambio de estado en estas entradas, el método básico procedimental es emplear las entradas digitales para consultar repetidamente el valor de la entrada, con un intervalo de tiempo (delay) entre consultas.
Este mecanismo se denomina "poll", y tiene 3 claras desventajas:
Para resolver este tipo de problemas, los microprocesadores incorporan el concepto de "interrupción", mecanismo que permite asociar una función a la ocurrencia de un determinado evento. Esta función de callback asociada se denomina ISR (Interruption Service Rutine).
Cuando ocurre el evento el procesador "sale" inmediatamente del flujo normal del programa y ejecuta la función ISR asociada ignorando por completo cualquier otra tarea (por esto se llama interrupción).
Al finalizar la función ISR asociada, el procesador vuelve al flujo principal, en el mismo punto donde había sido interrumpido.
Como vemos, las interrupciones son un mecanismo muy potente y cómodo que mejora nuestros programas y nos permite realizar acciones que no serían posibles sin el uso de interrupciones.
Para usar interrupciones en dispositivos físicos (como pulsadores, sensores ópticos, etc) debemos antes eliminar el efecto "rebote":
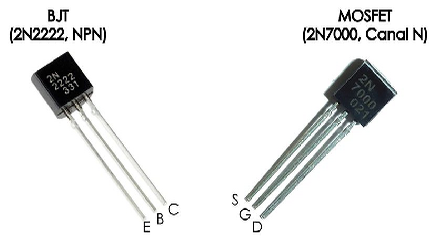
Los transistores BJT, que sirven para regular la señal de salida en corriente, mientras que los MOSFET regulan la señal de salida en voltaje.
El funcionamiento es básicamente el mismo, solo que unos regulan corriente (intensidad) y otros regulan voltaje.
La diferencia entre estos transistores es la tensión máxima de trabajo como explicaré en el siguiente párrafo.
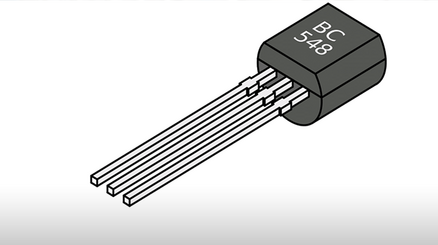
Además, el BC549 y el BC550 tienen un muy bajo nivel de ruido y son usados con señales débiles de audio en sistemas de alta fidelidad.
Para simplificar la explicación utilizamos el nombre BC54x cuando nos referimos a todos los miembros de la familia.

Los transistores son dispositivos semiconductores con tres terminales de conexión, llamadas base (B), colector (C), y emisor (E). En aplicaciones con transistores más avanzados, puerta (G), drenaje (D), y fuente (S).
Una corriente muy pequeña en una terminal puede controlar grandes cantidades de corriente a través de las otras dos terminales, siendo éste precisamente el funcionamiento de un transistor.
En base a la señal de entrada, el transistor suministrará una señal de salida que determinará el comportamiento de éste.
Por lo tanto, el transistor puede comportarse como: "amplificador de señales", "conmutador (switch)", "oscilador", y "rectificador de señales".
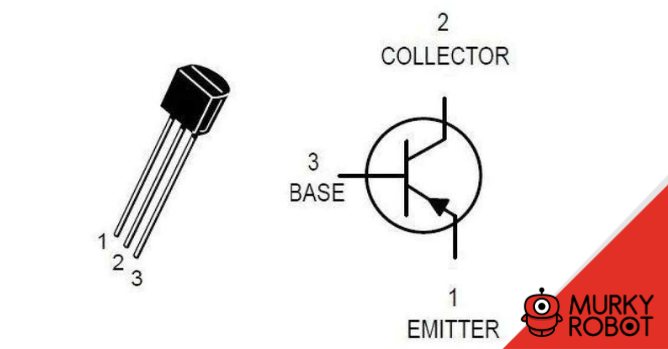
Se dice que el transistor está en corte cuando no hay un flujo de corriente pasando por su colector (IC = 0); por consiguiente, para lograr que la corriente del colector sea cero, no debe haber corriente irrumpiendo en la base del transistor (IB = 0).
El transistor está en saturación cuando el voltaje entre colector y emisor es cero (VCE = 0); para lograr que el transistor se comporte de tal manera, la corriente que circule por la base debe ser alta.
Teóricamente la corriente del colector es casi igual a la del emisor (IC ≈ IE), por lo que no será muy frecuente realizar cálculos que impliquen utilizar la corriente del emisor; casi siempre se verán involucradas la corriente de base y la corriente de colector para determinar la mayoría de los cálculos.

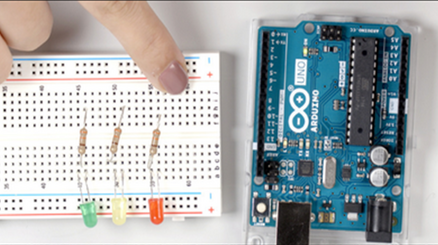
Hay muchos tipos de resistencias de ambos tipos fijas y variables. El tipo mas usado en electrónica es la resistencia de carbón.
Se fabrican en diferentes tamaños físicos con límites de disipación de potencia, normalmente desde 1 watt hacia abajo hasta 1/8 watt.
Los valores de resistencias y tolerancias se pueden determinar con el código de colores estándar de resistencias.
La codificación de valores para las resistencia funciona a base de colores. Estos colores están dispuestos en bandas de las cuales cada una representa un valor
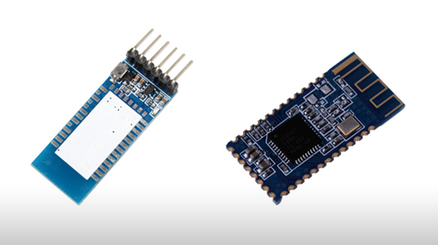
Los módulos HC-05 y HC-06 son módulos de Bluetooth que podemos usar para conectar Arduino por Bluetooth.
Mucha gente puede tener la impresión de que el Bluetooth es una tecnología anticuada, que se usaba para trasmitir datos entre dispositivos, y que actualmente está en desuso. Nada más lejos de la realidad.
Bluetooth tiene la enorme ventaja de estar integrado de fábrica en la mayoría de dispositivos. Portátiles, Tablets, y Smartphones llevan integrado Bluetooth. Además, su uso es independiente del sistema operativo (Windows, Linux, Mac o Android).
Esto convierte a la tecnología Bluetooth en uno de los mejores medios para comunicarnos de forma inalámbrica con Arduino. Por ejemplo, puede ser empleado para controlar un robot desde el móvil o Tablet, o para recibir mediciones en un ordenador para registrarlas en un servidor web.
Incluso es posible programar Arduino de forma inalámbrica a través de Bluetooth.
Los dos módulos, HC-05 y HC-06, nos permiten conectar de forma sencilla un Arduino por Bluetooth. La diferencia entre ambos módulos es que el HC-06 sólo permite recibir comunicaciones (slave) mientras que el HC-05 puede recibirlas e iniciarlas (master and server). Por tanto el módulo HC-05 es superior en características técnicas.
La comunicación Bluetooth es similar al uso del puerto serie normal. Por tanto, resulta muy versátil y muy sencillo de usar.
La diferencia principal es que, en lugar de un conectar un cable, debe emparejarse el módulo con un dispositivo. El proceso de emparejado depende del sistema operativo (y la versión del mismo) pero es, en general, un proceso sencillo.
Para establecer la comunicación desde el dispositivo, puede usarse el propio Serial Monitor del Arduino IDE. También se encontraran en todos los sistemas (Windows, Linux, Mac, o Android) las aplicaciones para establecer la comunicación por el puerto serie.
Por último, resulta muy sencillo integrar el uso del puerto serie (y por tanto del Bluetooth) en una gran variedad de lenguajes de programación, incluidos Java, C#, VB .Net, o Python, que disponen de funciones específicas para ellos.

Los puertos serie son la forma principal de comunicar una placa Arduino con un ordenador.
Gracias al puerto serie es posible, por ejemplo, mover el ratón o simular la escritura de un usuario en el teclado, enviar correos con alertas, controlar un robot realizando los cálculos en el ordenador, encender o apagar un dispositivo desde una página Web a través de Internet, o desde una aplicación móvil a través de Bluetooth.
Existen un sin fin de posibilidades en las que se requiere el empleo del puerto serie. Por tanto el puerto serie es un componente fundamental de una gran cantidad de proyectos de Arduino, y es uno de los elementos básicos que debemos aprender para poder sacar todo el potencial de Arduino.
Un puerto es el nombre genérico con que se denominan las interfaces, físicas o virtuales, que permiten la comunicación entre dos ordenadores o dispositivos.
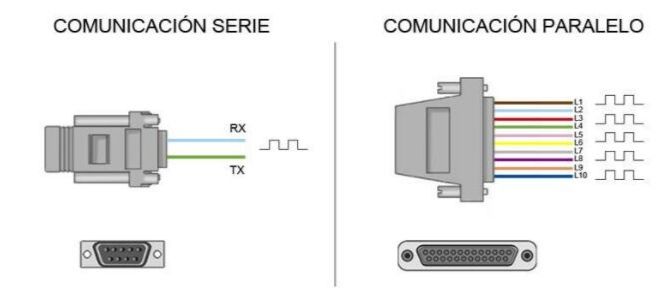
Un puerto serie envía la información mediante una secuencia de bits. Para ello se necesitan al menos dos conectores para realizar la comunicación de datos, RX (recepción) y TX (transmisión). No obstante, pueden existir otros conductores para referencia de tensión, sincronismo de reloj, etc.
Por el contrario, un puerto paralelo envía la información mediante múltiples canales de forma simultánea. Para ello necesita un número superior de conductores de comunicación, que varían en función del tipo de puerto. Igualmente existe la posibilidad de conductores adicionales además de los de comunicación.
Históricamente ambos tipos de puertos han convivido en los ordenadores, empleándose los puertos paralelos en aquellas aplicaciones que requerían la transmisión de mayores volúmenes de datos. Sin embargo, a medida que los procesadores se hicieron más rápidos los puertos de serie fueron desplazando progresivamente a los puertos paralelos en la mayoría de aplicaciones.
Un ordenador convencional dispone de varios puertos de serie. Los más conocidos son el popular USB (universal serial port) y el ya casi olvidado RS-232 (el de los antiguos ratones). Sin embargo, dentro del ámbito de la informática y automatización existen una gran cantidad adicional de tipos de puertos serie, como por ejemplo el RS-485, I2C, SPI, Serial Ata, Pcie Express, Ethernet o FireWire, entre otros.
En ocasiones se refieren a los puertos de serie como UART. La UART (universally asynchronous receiver/transmitter) es una unidad que incorporan ciertos procesadores, encargada de realiza la conversión de los datos a una secuencia de bits y transmitirlos o recibirlos a una velocidad determinada.
Por otro lado, también es común escuchar el término TTL (transistor-transistor logic). Esto significa que la comunicación se realiza mediante variaciones en la señal entre 0V y Vcc (donde Vcc suele ser 3.3V o 5V). Por el contrario, otros sistemas de transmisión emplean variaciones de voltaje de -Vcc a +Vcc (por ejemplo, los puertos RS-232 típicamente varían entre -13V a 13V).
Antes de conectar dos sistemas es necesario comprobar que los voltajes empleados son compatibles. En caso de no serlo, necesitaremos un subsistema que adapte los niveles de la señal, o podemos dañar alguno de los dispositivos.
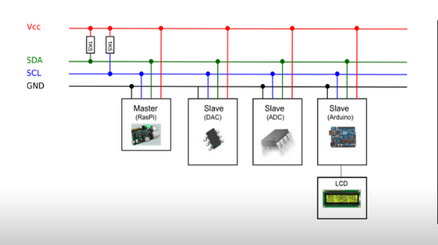
Esta guía se abordará el sistema de comunicación bus I2C, el cual es utilizado por una gran cantidad de dispositivos, como acelerómetros, brújulas, displays, etc.
Abreviatura de Inter-IC (I2C) (inter integrated circuits), un tipo de bus diseñado por Philips Semiconductors a principios de los 80s, que se utiliza para conectar circuitos integrados (ICs).
Es un estándar que facilita la comunicación entre microcontroladores, memorias y otros dispositivos con cierto nivel de "inteligencia".
La metodología de comunicación de datos del bus I2C es en serie y sincrónica. Sólo requiere de dos líneas de señal y un común o masa, una de las señales marca el tiempo (pulsos de reloj) y la otra se utiliza para intercambiar datos.

El protocolo de comunicación MQTT, se ha vuelto uno de los principales pilares del IoT por su sencillez y ligereza.
MQTT son las siglas MQ Telemetry Transport, aunque en primer lugar fue conocido como Message Queing Telemetry Transport.
Está basado en la pila TCP/IP como base para la comunicación.
En el caso de MQTT cada conexión se mantiene abierta y se «reutiliza» en cada comunicación.
Es una diferencia, por ejemplo, a una petición HTTP 1.0 donde cada transmisión se realiza a través de conexión.
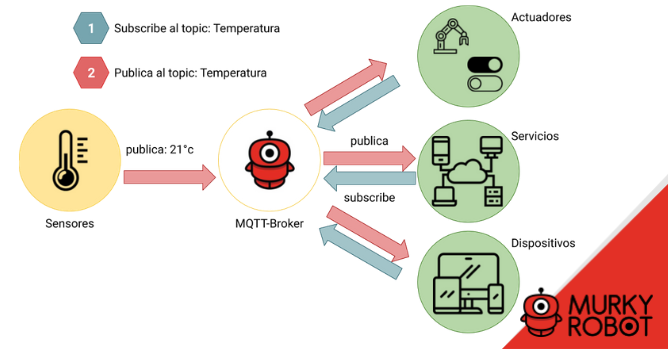
MQTT es un servicio de mensajería push con el modelo de publicador/suscriptor (pub-sub). En este tipo de arquitecturas los clientes (publicadores ó suscriptores) intercambia datos con un servidor centralizado o broker.
Para organizar las colas de envio y recepcion de datos estas se organizan por asuntos o topics.
Cada cliente puede publicar un mensaje en un determinado topic o recibir informacion de los topics a los que se encuentra suscripto.
Los clientes inician una conexión TCP/IP con el broker, el cual mantiene un registro de los clientes conectados.
Esta conexión se mantiene abierta hasta que el cliente la finaliza.
Para ello el cliente envía un mensaje CONNECT que contiene información necesaria (nombre de usuario, contraseña, client-id…).
El broker responde con un mensaje CONNACK, que contiene el resultado de la conexión (aceptada, rechazada, etc).
Por defecto, MQTT emplea el puerto 1883 y el 8883 cuando funciona sobre TLS.
MQTT dispone de un mecanismo de calidad del servicio o QoS, entendido como la forma de gestionar la robustez del envío de mensajes al cliente ante fallos (por ejemplo, de conectividad).
Usar un nivel u otro depende de las características y necesidades de fiabilidad de nuestro sistema.
Lógicamente, un nivel de QoS superior requiere un mayor intercambio mayor de mensajes de verificación con el cliente y, por tanto, mayor carga al sistema.
Son varias las ventajas del protocolo MQTT como sistema de comunicación IoT.
Por un lado, tenemos todas las ventajas de la arquitectura publicador/suscriptor como son escalabilidad, asincronismo, desacomplamiento entre clientes.
Otra ventaja es su ligereza del protocolo MQTT es que requiere un ancho de banda mínimo, lo cual es importante en redes inalámbricas (3G), o conexiones con posibles problemas de calidad.

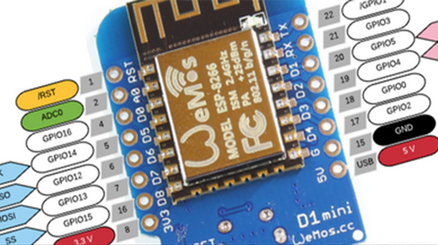
En este artículo integramos todo lo necesario para empezar a trabajar con él Wemos D1 Mini. Especificaciones técnicas, esquemas electrico, setup de arduino, drivers, libreria CAD, etc
La placa de desarrollo Wemos D1 está basada en el chip ESP8266 es un chip Wi-Fi de bajo costo con capacidad de MCU y stack de TCP/IP completa.
Las "WeMos D1 Mini" juntan las caracteristicas del chip ESP8266 junto con una placa modular con adaptador serial-micro USB y dimesiones compatibles con Protoboard.
Con este sencillo módulo podrás realizar el prototipo de cualquier sistema para el IoT en cuestión de horas.
El concepto es excelente, pues no requiere de otros accesorios para tener conexión a internet como el accesorio ethernet shield o wifi shield de arduino oficial.
La WeMos D1 Mini es del tamaño ideal para pequeños proyectos que requieran poco espacio, capacidad de procesamiento y conectividad WiFi integrada.
| Microcontrolador | ESP8266 |
|---|---|
| Voltaje Operativo | 3.3V |
| Pines GPIO | 11 |
| Pines Analógicos | 1 (Max input: 3.2V) |
| Interfaz SPI | 80 MHz/160 MHz |
| Flash | 16M bytes |
| Medidas | 34.2 x 25.6 mm |
| Peso | 2.5 g |
| Drivers | PC / MAC |






| Pin | Function | ESP-8266 Pin |
|---|---|---|
| TX | TXD | TXD |
| RX | RXD | RXD |
| A0 | Analog input, max 3.3V input | A0 |
| D0 | IO | GPIO16 |
| D1 | IO, SCL | GPIO5 |
| D2 | IO, SDA | GPIO4 |
| D3 | IO, 10k Pull-up | GPIO0 |
| D4 | IO, 10k Pull-up, BUILTIN_LED | GPIO2 |
| D5 | IO, SCK | GPIO14 |
| D6 | IO, MISO | GPIO12 |
| D7 | IO, MOSI | GPIO13 |
| D8 | IO, 10k Pull-down, SS | GPIO15 |
| G | Ground | GND |
| 5V | 5V | - |
| 3V3 | 3.3V | 3.3V |
| RST | Reset | RST |
Los módulos ESP8266 los podemos encontrar en diferentes encapsulados y placas:

En el mundo de la impresión 3D hay un aspecto que no se menciona muy a menudo y que es de vital importancia: disponer de las herramientas básicas para el mantenimiento de la impresora 3D.
Como cualquier otra máquinas, las impresoras 3D necesitan un mantenimiento después de ciertas horas de funcionamiento, en el cuál se debe limpiar y engrasar o sustituir algún elemento que esté desgastado, como el nozzle o el Heat Break.
El lubricante para impresoras 3D SuperLube presenta una buena resistencia al calor, de tal forma que aunque se use en impresoras con cama caliente el lubricante no tiende a hacerse líquido y no comienza a gotear sobre la base de impresión. La utilización de este lubricante es recomendable para evitar desgastes y reducir el rozamiento en rodamientos y varillas, lo que también aumenta la duración de los motores al estar sometidos a una carga menor.
Los cepillos de limpieza (nylon, latón y acero) son ideales para limpiar todos los componentes y superficies que forman la impresora 3D. Con los cepillos de limpieza se puede acceder a cualquier rincón de la impresora 3D con suma facilidad y reducir así tiempo y dinero en el mantenimiento. Los cepillos para la limpieza (latón) son muy utilizados para la limpieza de la parte exterior de los nozzles, ya que, simplemente con calentar un poco el nozzle y pasar el cepillo por él, sin aplicar excesiva fuerza, se obtiene una rápida limpieza.
Muchos usuarios de impresoras 3D, por comodidad o por ahorrar tiempo, utilizan los sprays fijadores (3DLac, Dimafix o PrintaFix) sin retirar la base de impresión de la impresora 3D, dejando restos del fijador por todas partes y dando lugar a zonas donde se adhiere el polvo , lo que afecta al funcionamiento de elementos cruciales como los ventiladores del HotEnd, los ventiladores de capa, los engranajes, husillos, etc. Por este motivo, es vital la utilización del limpiador de impresoras 3D. Con esta disolución acuosa se puede limpiar cualquier superficie de la impresora 3D con facilidad y sin causar ningún desperfecto.
Esta herramienta es esencial, ya que, la mayoría de filamentos de plástico están a menudo cargados estáticamente y atraen a todo tipo de residuos del entorno de trabajo hacia el filamento. Utilizando un limpiador de filamento se elimina todo tipo de suciedad (pelusa, polvo u otra suciedad) antes de que el filamento entre en el extrusor, aumentando la duración del mismo y de la boquilla de la impresora 3D, además de evitar atascos provocados por acumulación de la suciedad.
El filamento de limpieza es uno de los elementos de mantenimiento básicos para la impresión 3D. Este filamento elimina el material residual que va quedando en el interior del extrusor y puede ser aplicado en la transición entre dos materiales distintos que trabajan a diferentes temperaturas, o al finalizar la impresión. Con el empleo de esta herramienta se garantiza que el flujo sea suave, continuo y libre de atascos, además de alargar la vida del HotEnd.
Las pinzas de precisión deben ser de acero inoxidable de alta calidad con un recubrimiento antiácido, antimagnético y antiestático. Que sean libres de descargas electrostáticas (ESD) favorece la utilización de las pinzas de precisión en contacto con elementos electrónicos y eléctricos sensibles a este tipo de descargas, dando total seguridad para realizar operaciones de mantenimiento en cualquier punto de la impresora 3D.
En la tecnología FDM los alicates de corte de filamento son una herramienta indispensable en el día a día. Han sido diseñados específicamente para cortar filamento plástico con un ángulo agudo (en punta), imprescindible para conseguir introducir correctamente el filamento por el sistema de guiado de la parte de extrusión de la impresora 3D. Además, son muy utilizados para cortar los soportes generados en piezas realizadas en tecnología SLA.
En el mundo de la impresión 3D, el calibre (pie de rey) es una herramienta muy útil para comprobar diámetros y distancias importantes entre componentes. Esta herramienta es muy recomendada para verificar el diámetro del filamento, de componentes, estado del nozzle y asegurar la misma separación entre elementos conectados, como por ejemplo entre las guías laterales del eje z.
Las llaves Allen son una herramienta esencial para todo usuario de una impresora 3D, pues la mayoría de ellas contienen un gran número de tornillos con cabeza hexagonal tipo Allen. Gracias a esta herramienta, cualquier usuario puede realizar cualquier operación de mantenimiento en cualquiera impresora 3D, desde el reemplazo de un cartucho calentador o un cartucho termistor, hasta el desmontaje total de de la impresora.
Denominada como una de las herramientas que no debe falta en ningún lugar de trabajo, la llave inglesa es válida para cualquier tipo de tornillo con cabeza hexagonal externa o con forma de paralelepípedo. En impresión 3D es muy utilizada para sujetar el bloque calentador del extrusor y cambiar el nozzle de forma sencilla, evitando grandes desviaciones del bloque calentador y del nozzle, dando un proceso de nivelación de la base mucha más rápida y sencilla.
Los alicates son otra herramienta indispensable para todo usuario. Su uso se extiende a todo tipo de acción y mantenimiento sobre la impresora 3D, como por ejemplo: sujetar el bloque calentador para el cambio del nozzle, cortar cables como hilo eléctrico para reparaciones de la electrónica, acceder al interior de un agujero de una pieza impresa para retirar los soportes y agarrar con precisión elementos pequeños como los nozzles.
Las galgas de espesores son ideales para dar un margen de separación entre elementos que encajan entre sí o ajustar con precisión la distancia entre dos elementos. Por ejemplo: para separar la longitud exacta el nozzle de la base con el fin conseguir una buena impresión, o para el correcto montaje del extrusor y del HotEnd, donde es necesario cumplir con las holguras que los fabricantes indican en sus manuales de montaje para conseguir el correcto funcionamiento de todos los elementos que los forman.

El sector de la impresión 3D sigue en aumento y cada vez más personas adquieren una impresora 3D, tanto para uso profesional como doméstico, para realizar sus modelos, prototipos o piezas.
Es cierto que la forma de trabajar en tres dimensiones de una impresora 3D FDM o SLA permite realizar infinidad de piezas con geometrías complejas, pero hay que tener en cuenta que presentan ciertas limitaciones, muchas de las cuales dependen del tipo de impresora 3D que se utilice: Desktop o Industrial.
Por otro lado y concretamente en el sector profesional, se debe tener en cuenta que esta tecnología es ideal para la fabricación de pocas unidades de piezas grandes o muchas unidades de piezas pequeñas o medianas.
¿Qué uso tendrá la impresora 3D? Esta primera pregunta es fácil de responder, ya que cada usuario debería tener claro si necesita la impresora 3D para un uso profesional o doméstico.
A partir de aquí se deben tener en cuenta la siguientes hipótesis:
Uno de los principales factores a tener en cuenta es el tipo de usuario, ya que normalmente, este factor condiciona los tipos de materiales a utilizar, el tamaño de las piezas y el presupuesto para adquirir una impresora 3D. Por este último motivo y por la sencillez de utilización, las impresoras 3D tipo Desktop son las más adecuadas para usuarios domésticos o semi-profesionales. Con ellas se pueden realizar una gran variedad de piezas, limitadas a los materiales convencionales (PLA y ABS) y a algunos técnicos (TPE, TPU, PETG y algunos Nylons). Por otro lado y aunque para impresoras 3D industriales se necesitan ciertos conocimientos previos, los usurarios profesionales obtendrán grandes beneficios con este tipo de impresoras, comenzando el aprendizaje con materiales convencionales (ABS), continuando con materiales técnicos (ASA) y finalizando con materiales avanzados como PEKK o PEI. Si deseas saber más información sobre qué impresora comprar visita el siguiente link.
Para comenzar en la impresión 3D FDM existe un material por excelencia, el PLA. El PLA es el material más consumido en este sector gracias a su facilidad de impresión, a su precio, variedad de colores y a ser respetuoso con el medio ambiente. A la hora de comprar PLA es recomendable adquirir uno de calidad, con una buena tolerancia de diámetro y buen acabo para evitar problemas durante la impresión, como por ejemplo atascos. Una vez dominado la impresión con PLA, el siguiente paso es aventurarse con el material que más necesite o desee cada usuario, como filamentos flexibles (TPU y TPE) u otros con mayores propiedades mecánicas (ABS, ASA, CPE HG100, etc), teniendo en cuenta las limitaciones de cada impresora 3D.
Desde el laminado de una pieza hasta después de la fabricación se deben tener en cuenta ciertos aspectos para conseguir realizar piezas con éxito y sin ningún problema. Antes de imprimir se debe revisar: que el archivo STL no presente defectos, que los parámetros de impresión son adecuados al material, la cantidad de filamento y el nivelado de la base. Durante la impresión hay que tener en cuenta: las corrientes de aire, la temperatura exterior, posibles atascos, que la temperatura de impresión sea estable y la adhesión de la primera capa. Después de cada impresión es aconsejable: separar la pieza con cuidado de la base, comprobar el estado del nozzle, limpiar la base para la siguiente impresión y comprobar las dimensiones y acabados de la pieza.
Una de las ventajas que tiene el mundo de la impresión 3D es la gran comunidad que existe, donde foros cuenta con una gran cantidad de usuarios dispuestos a ayudarse entre ellos en todo momento.

Las principales causas que provocan un atasco en el extrusor son la utilización de materiales de baja calidad, las impurezas alojadas en el filamento debido a un mal almacenamiento o por utilizarlo en temperaturas fuera del rango que recomienda el fabricante.
Este método es el más sencillo y rápido de realizar. Primero se calienta el extrusor hasta la temperatura de impresión del filamento que ha atascado la boquilla (por ejemplo, PLA 190ºC). A continuación, reducimos la temperatura hasta que esté próxima a la temperatura de transición vítrea del material, para el PLA sobre 90ºC, y así conseguir que solidifique el material y las impurezas que provocan el atasco con el filamento. Ahora es el momento de tirar fuerte del filamento con una mano y con la otra sujetar el extrusor. Se debe repetir este proceso hasta conseguir que el filamento salga libre de impurezas.

Este método es muy eficaz con atascos de media o baja gravedad. El proceso es muy simple, sólo se debe calentar el HotEnd a la temperatura de extrusión del material que ha provocado el atasco, introducir la aguja de precisión entre 10 mm y 30 mm por el nozzle unas 3 o 4 veces. A continuación, se comprueba que se ha liberado el atasco accionando el extrusor una longitud de 100 mm. En caso de no obtener un flujo continuo, se vuelve a realizar el proceso.
Este método sólo es eficaz si el atasco se ha producido utilizando ABS. Antes de iniciar el proceso se necesita acetona pura (no quitaesmalte) en un tarro de cristal con tapa. Se retira el nozzle del HotEnd, siempre con el HotEnd caliente para facilitar el proceso y evitar daños en los componentes. Una vez retirado el nozzle se introduce en el tarro con acetona y se deja en el líquido durante 24h. Pasado ese tiempo, retiramos el nozzle de la acetona y nos ayudamos, si es necesario, de una aguja o alfiler para limpiar el interior del nozzle, siempre con mucho cuidado de no dañar las paredes internas. Por último, montamos de nuevo el nozzle en el HotEnd y comprobamos que esté desatascado.
Mantener el exterior del nozzle es muy sencillo, simplemente hay que calentar el HotEnd hasta la temperatura de transición vítrea del material y con un papel, trozo de tela o lana de acero fina frotar suavemente la boquilla para retirar los restos de material depositados en ella.
En caso de que el atasco sea muy grave, la única solución es cambiar el nozzle por uno nuevo, por eso es aconsejable disponer siempre de una boquilla de repuesto.
Para finalizar, dejamos algunos consejos para evitar problemas, no sólo con los nozzles, sino también con todo lo relacionado con la impresora 3D:
No se debe olvidar que mantener las impresoras 3D con los mejores componentes y filamentos, asegura que todos los trabajos sean siempre de máxima calidad.

Los usuarios de impresoras 3D domésticas (FFF/FDM) a menudo se pueden encontrar con problemas de varios tipos, que pueden ser debidos a un filamento de mala calidad, parámetros de impresión indebidos, condiciones poco apropiadas para la ubicación de las impresoras 3D (como ambientes húmedos, fríos o con corrientes de aire) y la falta de mantenimiento, y calibración de la impresora 3D.
Una de las partes más importantes a calibrar en una impresora 3D es la base o cama, ya que, en caso de no estar bien nivelada, no se obtendrán buenos resultados de impresión.
En este artículo nos centraremos en el caso de nivelación manual, por ser el más habitual en la gran mayoría de impresoras 3D FFF/FDM del mercado.
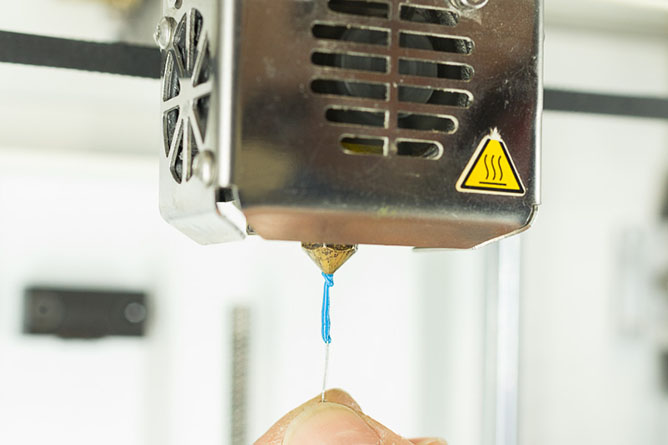
Si la impresora 3D dispone de base de cristal y utilizamos algún spray fijador (como Magigoo, 3DLac o DimaFix), es aconsejable lavar bien la base para evitar posibles problemas al nivelarla. Es vital también, retirar cualquier resto de filamento que se encuentre colgando del nozzle (boquilla), porque de lo contrario, tendremos un error de medida producido por ese sedimento de material.
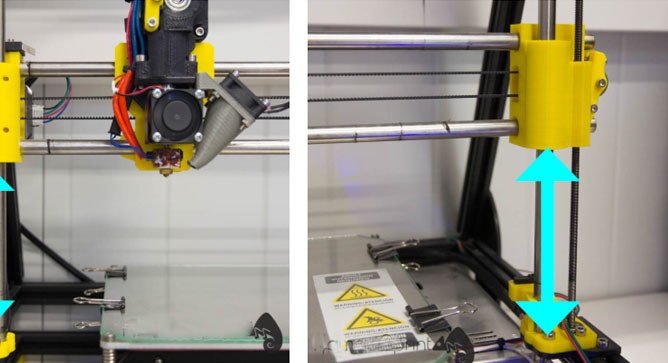
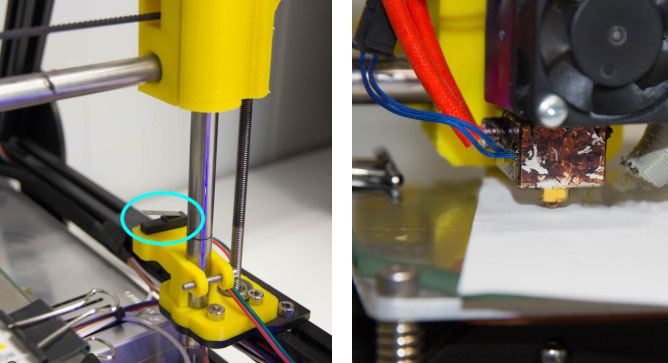
Por otra parte, se deben colocar en el punto medio de su recorrido los tornillos de regulación de la propia base. Además, al realizar el “home” del eje z,se debe desplazar el final de carrera del eje z, ampliando la distancia entre la base y el extrusor, para evitar posibles contactos, o incluso roturas del cristal o de algún soporte de la impresora 3D.
Es necesario ajustar este eje (que es por el que se mueve el propio extrusor) para que al desplazarse el extrusor no se produzcan variaciones de altura entre la punta de este y la base. Para empezar, se debe comprobar que la altura en ambos lados sea la misma, midiendo desde un punto de la guía del eje z a un punto fijo de la impresora 3D. Para igualarla, se gira manualmente el motor del lado que se necesita ajustar, sujetando del otro lado para que no gire. Si no hacemos esto, y debido a que los motores del eje z están conectados en paralelo, al hacer girar uno, generaría electricidad y giraría el otro.
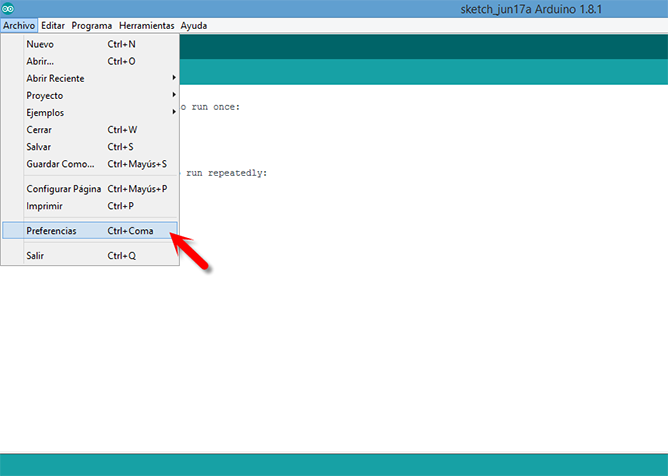
Para este paso, si la impresora 3D no dispone de nivelado asistido, se utilizarán programas de impresión 3D como Cura3d o Pronterface, que tienen asistente para hacer "home" en z o directamente un apartado de nivelación de base. El software realiza el desplazamiento del eje z y se ajusta manualmente el final de carrera hasta que quede muy próxima la punta del extrusor a la base.
En este paso se debe que tener en cuenta el diámetro de salida del nozzle. La altura ideal es siempre la mitad del diámetro de salida. Es decir, si la impresora 3D tiene un nozzle de 0.6mm, la altura ideal sería 0.3mm. Para que esta distancia sea exacta se utilizará una galga de ese espesor, o en su ausencia, y debido a que la mayoría de las impresoras 3D utilizan un nozzle de 0.4mm, se empleará un folio de papel de 80g que tiene un espesor aproximado de 0.2mm. Introducimos el folio entre la punta del extrusor y la base, y hacemos bajar el eje z hasta el "home". La altura será correcta cuando el folio no esté completamente libre, ni quede tirante, si no que cuando se note rozar el folio de papel con el nozzle (boquilla).
Para ajustar esta distancia se gira el tornillo hacia un sentido o hacia el otro, en función de si se necesita subir o bajar la base. Este proceso tendrá que realizarse en las proximidades de los tornillos de nivelación de la propia base las veces necesarias hasta conseguir la altura ideal.
Con solo dedicar unos minutos a realizar estos pasos de nivelación de la base, se evitarán muchos problemas de impresión.

El nozzle de una impresora 3D, como todo elemento que está en contacto (rozamiento) con otro material, presenta un desgaste con el uso, que como hemos comentado en el artículo anterior, varía en función del material del nozzle y del tipo de filamento que se utilice. Para detectar cuando el desgaste es acusado recurriremos a 2 sencillas técnicas:
Cuando el desgaste es muy acusado se detecta en la punta del nozzle a simple vista, como se aprecia en la siguiente imagen.

Puede suceder que, aún teniendo todos los parámetros de impresión correctos, el modelo 3D sin imperfecciones y el nozzle en buen estado a simple vista, interiormente esté desgastado y provoque malformaciones y malos acabados superficiales en las piezas impresas debido al flujo turbulento del plástico por el interior del mismo.
Para poder aplicar este método tendremos que disponer del plano del nozzle de la impresora 3D que estamos utilizando, documento que la mayoría de los fabricantes tienen disponible para su descarga en su página web. En este caso vamos a utilizar el plano del Nozzle E3D v6.
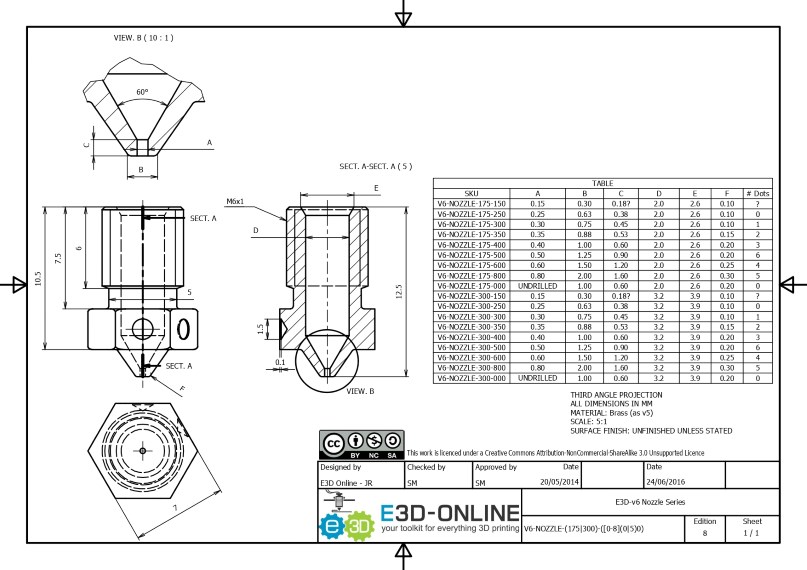
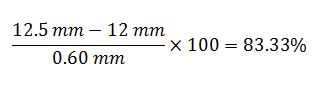
La medida que nos interesa es la "C" que representa la longitud del perforado de salida del filamento después del cono de extrusión. El desgaste no debe ser nunca superior al 80% de la longitud total de "C", ya que si el desgaste se aproxima más al cono interno, las impresiones 3D serán de mala calidad, o incluso imposibles de realizar. Para comprobar este valor tenemos que retirar el nozzle del HotEnd, medir la longitud total y aplicar la siguiente fórmula:

Como se aprecia en el plano, la longitud original total del Nozzle E3D v6 es de 12.5 mm, para el modelo con diámetro de salida 0.40 mm "C" mide 0.60 mm. En este caso, la longitud total del nozzle es de 12 mm, por lo que aplicando la fórmula anterior obtenemos que el porcentaje de desgaste es del 83%, lo que indica que es necesario sustituir el nozzle por uno nuevo.
Independientemente de las herramientas que tengas en tu laboratorio de electrónica, hay algunas cosas a las que debe prestar atención para asegurarse de que su laboratorio esté en perfectas condiciones.
Al igual que la mayoría de los equipos electrónicos y eléctricos, existen muchos multímetros, los mas comunes son "los multímetros electrónicos", "los electro-mecánicos" y "los multímetros de pinzas".
Hay diferencias entre todos estos, pero al final lo que estamos buscando es algo que pueda medir de "todo".
La medición principal que debe esperar en el mejor multímetro digital incluye mediciones de "voltaje", "resistencia" y "continuidad" entre otras.
En la mayoría de los casos, los multímetros son diseñados para trabajar con circuitos eléctricos y/o solucionar problemas existentes.
Además de esto, se han perfeccionado a lo largo de los años para manejar otras mediciones como "temperatura", "voltaje sin contacto" y algunos vienen con puntas de sonda.
El multímetro es el instrumental estrella de nuestro lab. es conveniente invertir en uno que cuente con el respaldo de una marca, que nos asegure conseguir repuestos de piezas en caso de necesitarlo.
Una herramienta rotativa se usa principalmente para hacer agujeros cajas de plástico, perforar agujeros a través de una placa de circuito impreso, recortar una PCB que es ligeramente grande para que pueda caber en el gabinete en el que está destinado, etc.
Al igual que cualquier otra herramienta que tenga en su laboratorio, estos también tienen diferentes precios y, como tal, es importante que reduzca sus opciones a lo que realmente necesita.
Las herramientas rotativas por excelencia es el "dremmel" o similar, que puede comprarse con un kits con muchos accesorios. Son básicos: "los discos de corte" en miniatura, "los tambores de lijado" y las mechas para aplicaciones electrónicas.
Si ya sabes algo sobre electrónica o no... todo en electrónica se reduce a señales y el osciloscopio resulta ser la herramienta principal en la medición y observación de señales.
Normalmente tienen una pantalla en formato gráfico con ejes X e Y. El eje Y se usa normalmente para indicar lecturas de voltaje, mientras que el eje X se usa para indicar el tiempo. Los osciloscopios son normalmente una forma rápida, potente y precisa de medir formas de señal.
Entonces, si necesitas saber exactamente qué está sucediendo en un circuito eléctrico, esta es una herramienta imprescindible.
Las funciones básicas que necesitamos de un osciloscopio son: medición de voltaje pico a pico, medición de ancho de pulso, tiempos de subida, comparaciones de señales. Cuanta las alta sea la frecuencia de muestreo, mas posibilidades de medición tendremos.
Algunos componentes son tan pequeños que es difícil o bastante imposible poder sostenerlos con un par de pinzas o incluso verlos.
Si vas a trabajar como Maker, debes tener algunas herramientas ópticas de laboratorio. Esto podría ser lupas de aumento o incluso lentes de gran aumento. Sin embargo, la cuestión con esto es que el aumento solo puede llegar hasta 5-10x, lo que no es tan útil.
Para usuarios avanzados, que planifican un montaje de superficie o inspección de equipos electrónicos, sería una buena idea obtener un microscopio estereoscópico. Esto normalmente tiene un nivel de aumento de entre 25x y más de 90x que es bastante practico.
Similar a los multímetros, los medidores LCR también tienen una aplicación bastante amplia, normalmente se recomiendan en la medición de inductancia (L), capacitancia (C) y resistencia (R) de ahí el nombre de medidor LCR.
Hay dos variantes una que mide la impedancia total de un componente eléctrico. Otro que no solo mide la impedancia equivalente, sino que también puede medir la resistencia de la serie de equivalencia (ESR) y el factor de calidad de los componentes (Q).
Si deseamos tener más precisión del medidor LCR, tendremos que gastar más efectivo ya que los de bajo precio tienen tolerancias de precisión de hasta el 20%, lo que puede marcar una gran diferencia.
Hay muchas fuentes de alimentación con diferentes características. En un laboratorio de uso general, por ejemplo, las características más importantes que debe tener en su fuente de alimentación incluyen control variable de corriente y voltaje.
Una fuente de alimentación básicamente le permite suministrar diferentes voltajes para diferentes aplicaciones y la mayoría de estos pueden funcionar en modo de voltaje constante o corriente. Esto hace que sea mucho más fácil solucionar problemas de diferentes componentes o incluso una parte de su diseño electrónico y también mucho más rápido.

El polímetro o multímetro es un aparato de medidas eléctricas. Con el se pueden medir magnitudes directamente como la tensión, la intensidad y la resistencia eléctrica.
Recuerda la Intensidad se mide en Amperios (A), la Tensión en Voltios (V) y la Resistencia en Ohmios (Ω).
Todas ellas tiene múltiplos y submúltiplos. Por ejemplo miliamperios (mA).
Lo primero es saber las partes básicas de las que consta cualquier polimetro:

La rueda selectora nos permite optar por la magnitud que deseemos medir, es decir selecciona el campo de medida.
Si se desconoce el rango del valor a medir, se debe seleccionar la rueda de tal manera que el polímetro realice la lectura máxima, con lo que evitarás que se pueda estropear.
Si compruebas que la escala elegida es muy grande, se va bajando de escala hasta que veas que es la apropiada.
*Presente en todos los multímetros
Una vez seleccionado la magnitud que vamos a medir, es hora de conectar las puntas de medición, en las hembrillas de conexión.
La punta negra siempre va en el agujero identificado como COM COM y la Roja depende de si vamos a medir tensión o corriente.
Si queremos medir intensidades en corriente alterna, la punta roja se inserta en la bornera según el orden de magnitud: 20A máx ó 20 amperes máximo - 200mA máx o 200 miliaperes máximo.
Para medir tensión la punta roja debe ir en la bornera de uso general identificada con una V.
Dependiendo de tu multímetro las borneras puedes estar con diferente nomenclatura y pueden tener otras para conectan otros dispositivos.
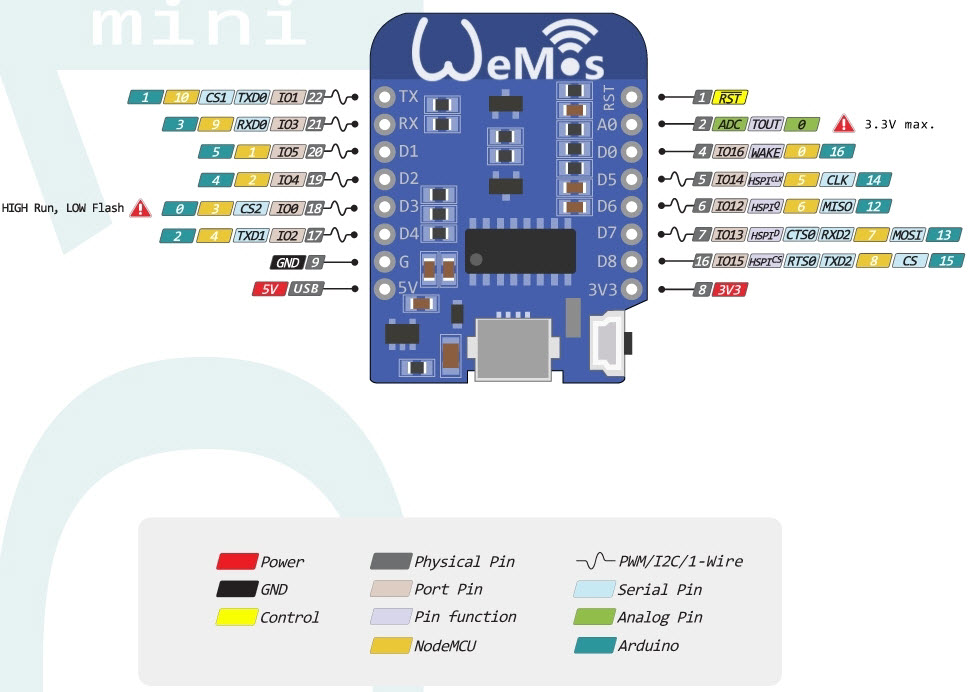
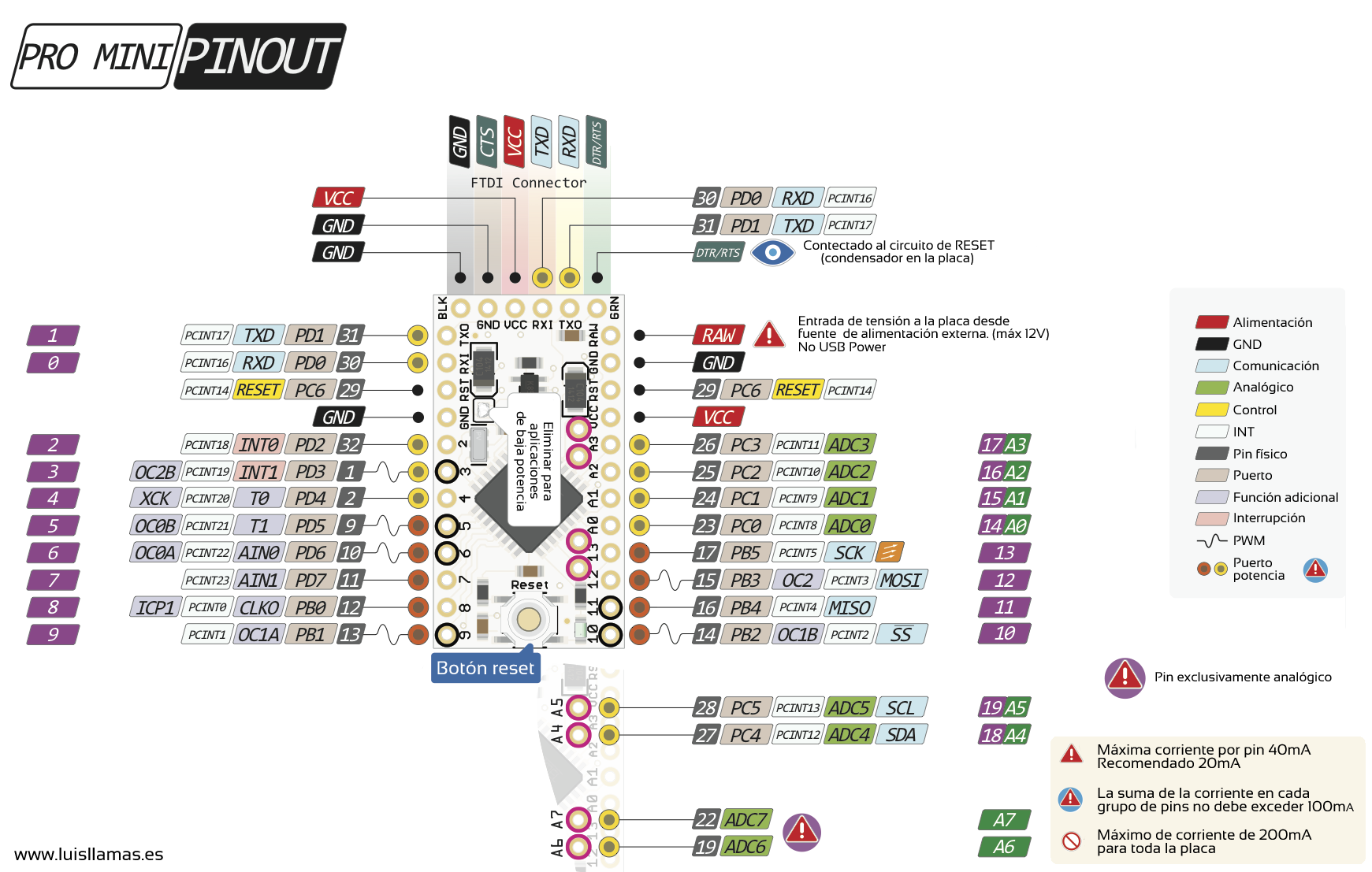
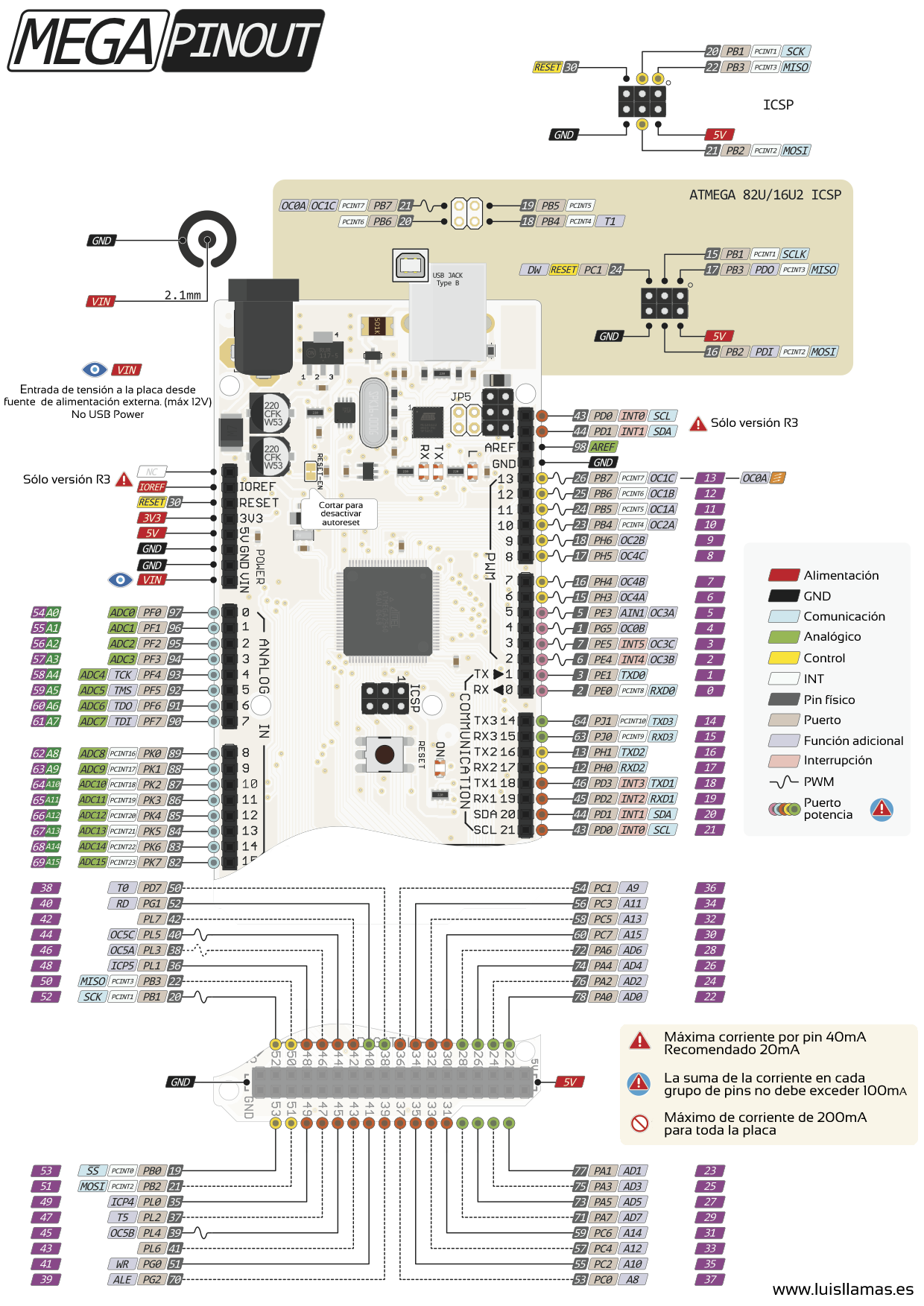
El PINOUT es uno de los artículos de referencia más útiles para el maker y que mas frecuentemente consultaremos a la hora de realizar un proyecto.
En este documento recopilamos el "esquema de conexiones" de las placas Wemos con el chipset ESP-8266EX.
Placa "mini" con WIFI y 4MB de flash. Basada en ESP-8266EX.
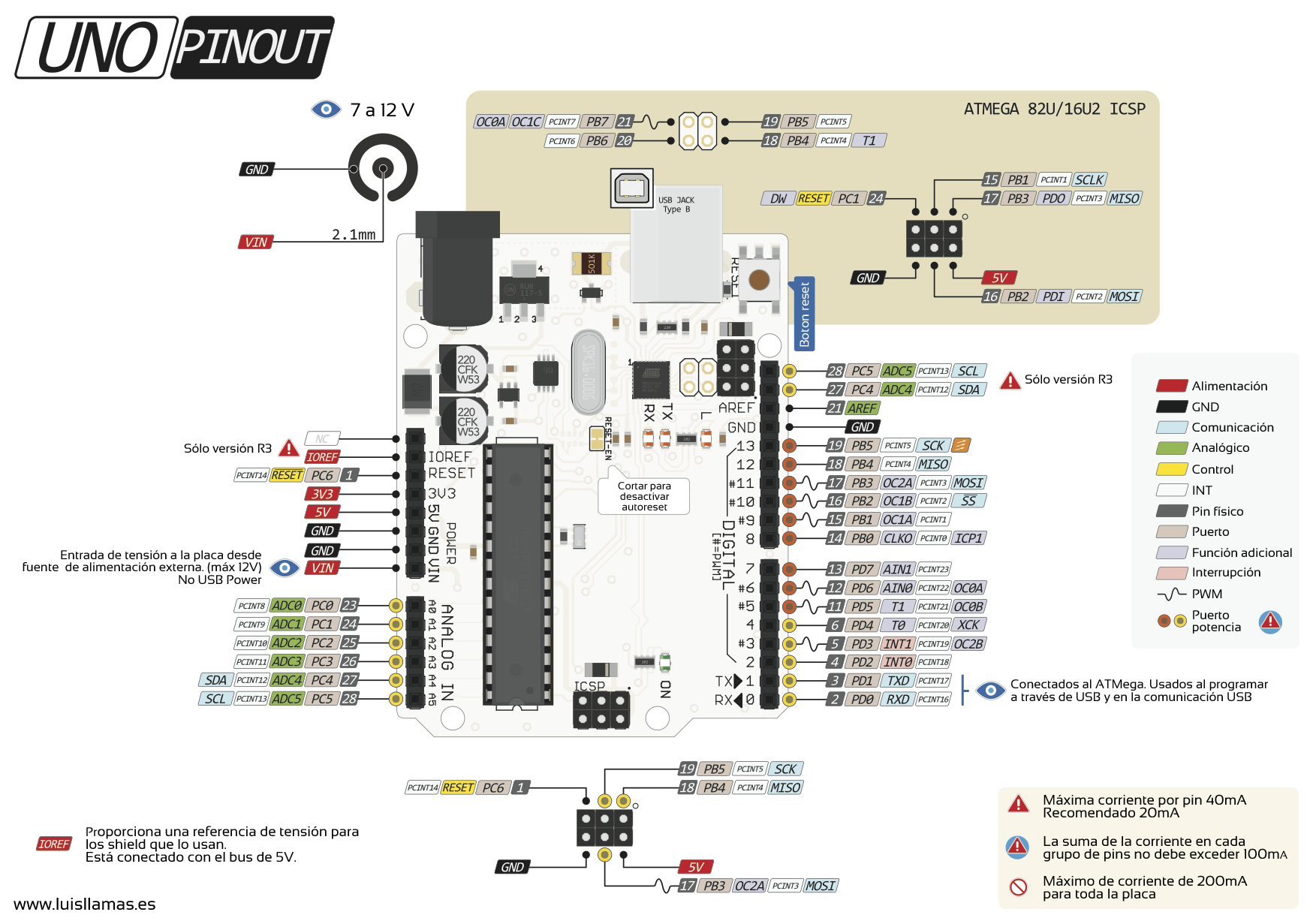
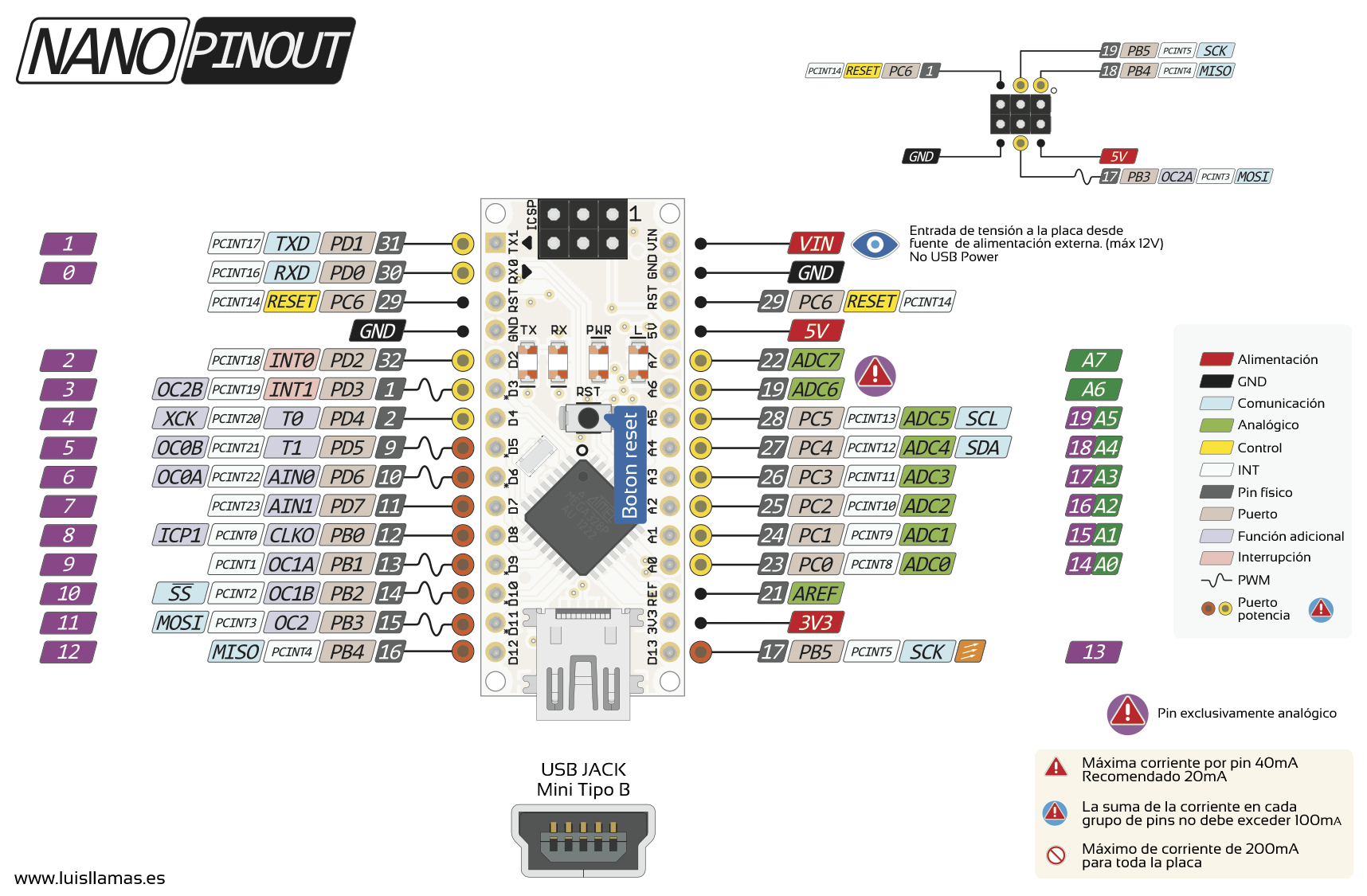
El PINOUT es uno de los artículos de referencia más útiles para el maker y que mas frecuentemente consultaremos a la hora de realizar un proyecto.
En este documento recopilamos el "esquema de conexiones" de las placas Arduino.














Copyright © 2026 - Murky Robot - Todos los derechos reservados