Envíos a
todo el país

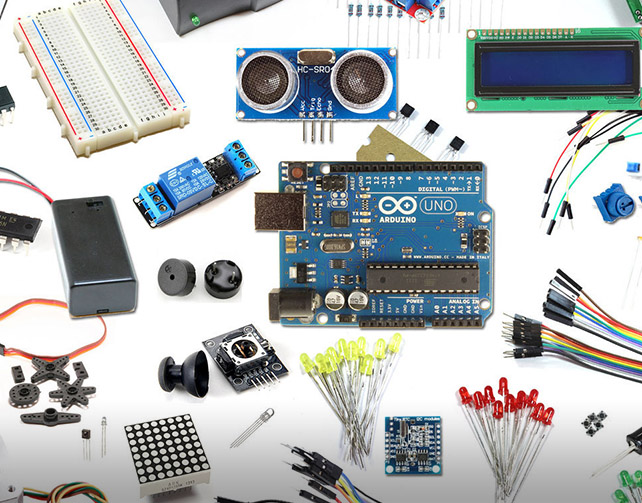
Aprende a trabajar con Arduino la plataforma de desarrollo basada en una placa electrónica de "hardware libre" que incorpora un microcontrolador re-programable.

La domótica es principalmente un conjunto de tecnología que se aplican para lograr que una casa pueda ser inteligente.
Controla el consumo de energía, mejora el uso de la iluminación y mejora la seguridad de tu casa gracias a las herramientas de la domótica
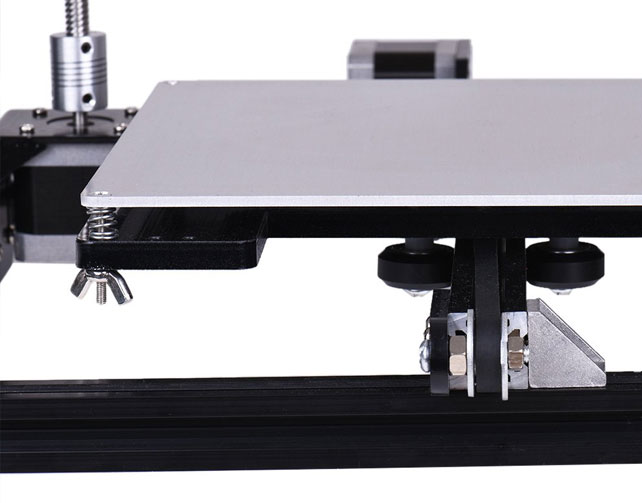
Sácale provecho a la impresión 3D con los upgrades para las impresoras mas populares del mercado.
Piezas re-diseñadas, repuestos, guías y servicie

Tenemos una colección de proyectos con guías paso a paso y hacks para aprender, haciendo.
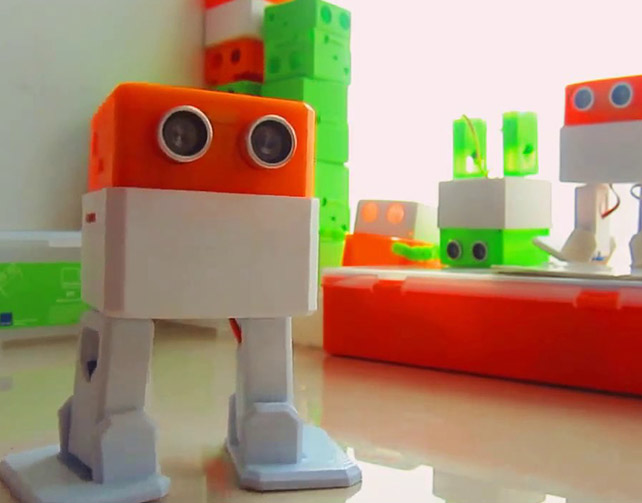
Kits de robótica educativa segmentada en las distintas edades, etapas de aprendizaje, niveles de complejidad.
El principal objetivo pedagógico es incentivar la creatividad y fomentar la innovación evolutiva.
Suscríbase y reciba nuestras novedades
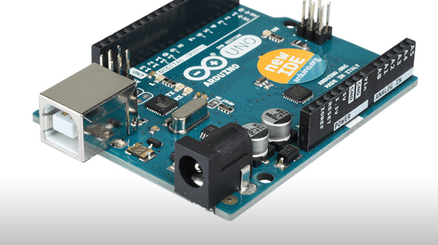
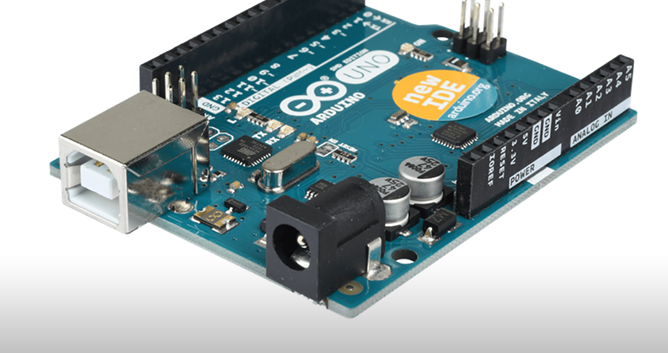
Arduino es una plataforma de desarrollo basada en un microcontrolador ATMEL, la cual está basada en hardware y software libre, flexible y fácil de utilizar para los makers.
Arduino es un proyecto y no un modelo concreto de placa, lo que quiere decir que compartiendo su diseño básico te puedes encontrar con diferentes tipos de placas. Las hay de varias formas, tamaños y colores para a las necesidades del proyecto en el que estés trabajando, las hay sencillas o con características mejoradas, Arduinos orientados al Internet de las Cosas o la impresión 3D y, por supuesto, dependiendo de estas características te encontrarás con todo tipo de precios.
La librerías estándar vienen preinstaladas en el IDE de Arduino. La forma más fácil de saber cuales son consultar al sitio oficial de Arduino.
Estas librerías no se incluyen como opción por defecto en tus sketches, tienes que cargar las que vayas a utilizar de a una. De esta manera se utilizan los recursos de memoria del Arduino con mayor eficiencia al cargar únicamente aquellas librerías que van a ser utilizadas.
Para incluir un librería basta con añadir una declaración #include al comienzo del sketch.
Por ejemplo, si quieres incluir la librería de cristal líquido, que se utiliza para exhibir datos en una pantalla LCD, basta con incluir la siguiente declaración al principio de tu sketch:
#include <LiquidCrystal.h>
Observa que el nombre de la librería tiene que ir limitado por los corchetes menor/mayor: < y >. Además hay que notar que la línea no termina con un punto y coma (;) como es la norma en las demás líneas de código.
A continuación veremos las diferentes librerías estándar.
loremSolución de problemas frecuentes con Arduino
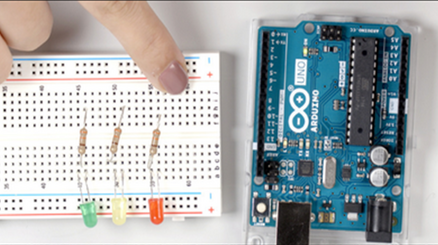
Los rebotes son las falsas pulsaciones (ruido) que se producen al hacer falsos contactos en el interruptor. El proceso de eliminarlos se llama "Debounce".
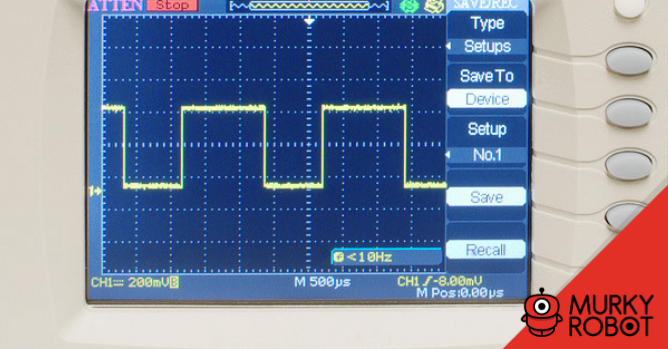
Los dispositivos electrónicos al cambiar de estado generan una señal que, sin ser perfectamente cuadrada, en general es más o menos "recta". Veamos, por ejemplo, la señal que genera Arduino al cambiar el estado de una salida digital de HIGH a LOW.
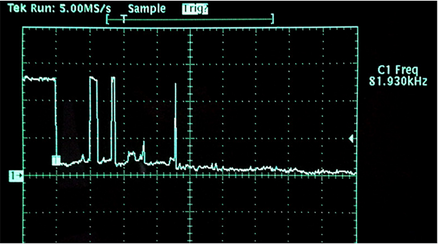
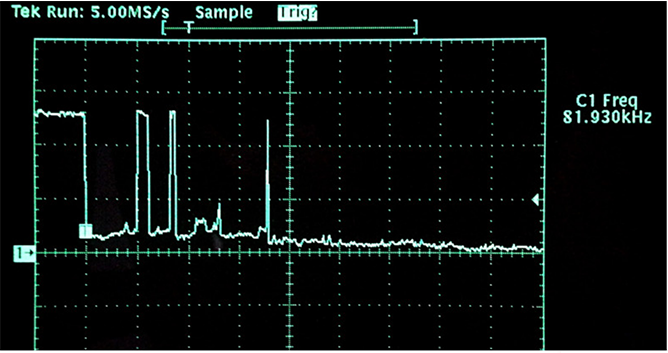
Sin embargo el entorno real muchos dispositivos físicos habitualmente generan ruido en los flancos de señal. Como ejemplo, veamos la variación de tensión que ocurre cuando el cambio de estado se genera por un pulsador.
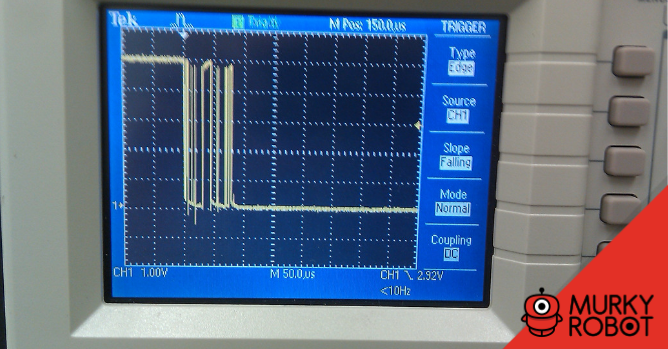
Observar la cantidad de ruido ocurrido tras el cambio de estado. En esencia, en el rango de unos micro-segundos la señal es puro ruido. Todos esos picos pueden provocar disparos múltiples de una interrupción.
Las interrupciones son un mecanismo muy potente y valioso en procesadores y autómatas. Arduino, por supuesto, no es una excepción.
En esta guía veremos qué son las interrupciones, y como usarlas en nuestro código.
Para entender la utilidad y necesidad de las interrupciones, supongamos que tenemos conectado a Arduino: "encoder óptico" que cuenta las revoluciones de un motor, un "sensor de líquidos" que emite una alarma de nivel de agua en un depósito, y un pulsador de parada.
Si queremos detectar un cambio de estado en estas entradas, el método básico procedimental es emplear las entradas digitales para consultar repetidamente el valor de la entrada, con un intervalo de tiempo (delay) entre consultas.
Este mecanismo se denomina "poll", y tiene 3 claras desventajas:
Para resolver este tipo de problemas, los microprocesadores incorporan el concepto de "interrupción", mecanismo que permite asociar una función a la ocurrencia de un determinado evento. Esta función de callback asociada se denomina ISR (Interruption Service Rutine).
Cuando ocurre el evento el procesador "sale" inmediatamente del flujo normal del programa y ejecuta la función ISR asociada ignorando por completo cualquier otra tarea (por esto se llama interrupción).
Al finalizar la función ISR asociada, el procesador vuelve al flujo principal, en el mismo punto donde había sido interrumpido.
Como vemos, las interrupciones son un mecanismo muy potente y cómodo que mejora nuestros programas y nos permite realizar acciones que no serían posibles sin el uso de interrupciones.
Para usar interrupciones en dispositivos físicos (como pulsadores, sensores ópticos, etc) debemos antes eliminar el efecto "rebote":














Copyright © 2026 - Murky Robot - Todos los derechos reservados