Envíos a
todo el país

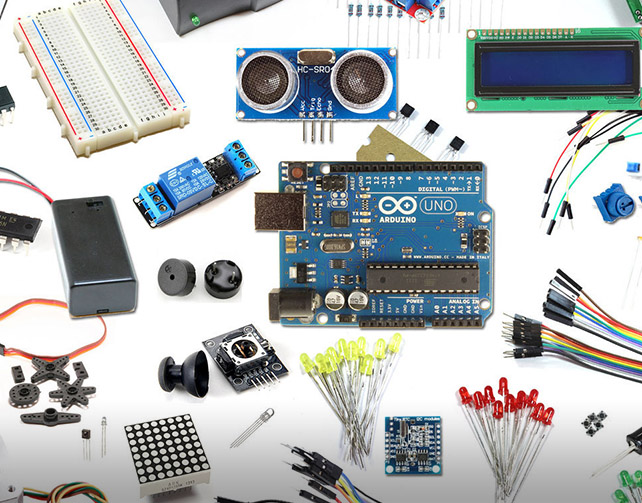
Aprende a trabajar con Arduino la plataforma de desarrollo basada en una placa electrónica de "hardware libre" que incorpora un microcontrolador re-programable.

La domótica es principalmente un conjunto de tecnología que se aplican para lograr que una casa pueda ser inteligente.
Controla el consumo de energía, mejora el uso de la iluminación y mejora la seguridad de tu casa gracias a las herramientas de la domótica
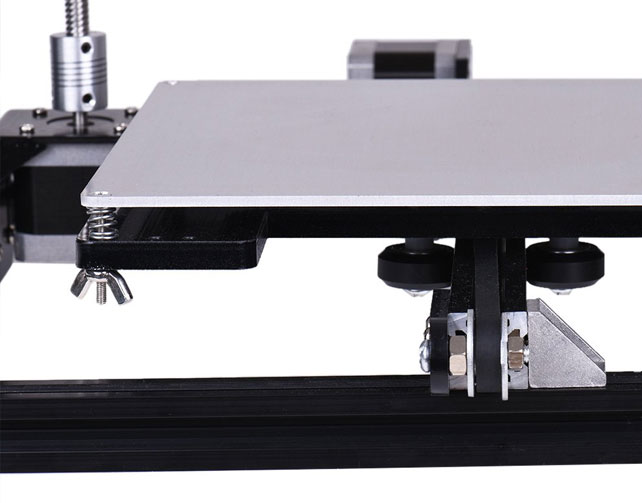
Sácale provecho a la impresión 3D con los upgrades para las impresoras mas populares del mercado.
Piezas re-diseñadas, repuestos, guías y servicie

Tenemos una colección de proyectos con guías paso a paso y hacks para aprender, haciendo.
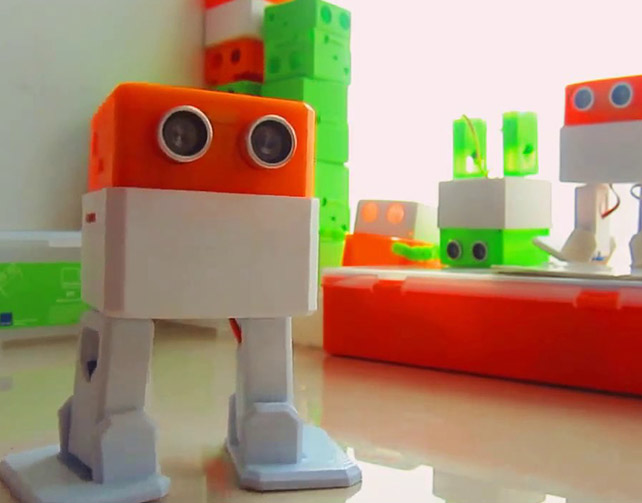
Kits de robótica educativa segmentada en las distintas edades, etapas de aprendizaje, niveles de complejidad.
El principal objetivo pedagógico es incentivar la creatividad y fomentar la innovación evolutiva.
Suscríbase y reciba nuestras novedades
Un ACTUADOR es un dispositivo mecánico cuya función es proporcionar fuerza para mover o actuar sobre otro dispositivo mecánico.
La fuerza que provoca el actuador proviene de tres fuentes posibles: Presión Neumática, Presión Hidráulica, o Fuerza Eléctrica (motor eléctrico o solenoide).
Dependiendo de el origen de la fuerza el actuador se denomina "neumático", "hidráulico" o "eléctrico".
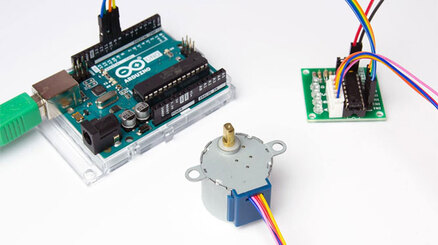
El 28BYJ-48 es uno de los motores paso a paso más baratos que puedes encontrar. Aunque no es súper preciso ni potente, es un gran motor para usar en proyectos más pequeños o si solo quieres aprender sobre motores paso a paso.
Este motor se usa a menudo para ajustar automáticamente las paletas de una unidad de aire acondicionado. Tiene una caja de reducción incorporada, que le da un par extra y reduce drásticamente la velocidad.
A continuación puede encontrar las especificaciones para el motor paso a paso y el controlador que se utilizan en este tutorial.
| Voltaje nominal | 5 V |
| Resistencia de la bonina | 50 Ohms |
| Bobina tipo | Unipolar |
| Diámetro - eje | 5.00 mm |
| Longitud - eje y rodamiento | 10 mm |
| Características | Eje aplanado |
| Tamaño / dimensión | 28.00 mm |
| Caja de Reducción | 1/64 |
| Angulo de paso | Modo de medio paso (recomendado): 0.0879° Modo paso completo: 0.176° |
| Pasos por revolución | Modo de medio paso: 4096 (see note) Modo paso completo: 2048 |
| Terminales de conexión | Cables con conector |
| Tipo de motor | Motor de imán permanente |
| Numero de fases | 4 |
Para obtener más información, puede consultar la hoja de datos:
28byj48 -
ULN2003
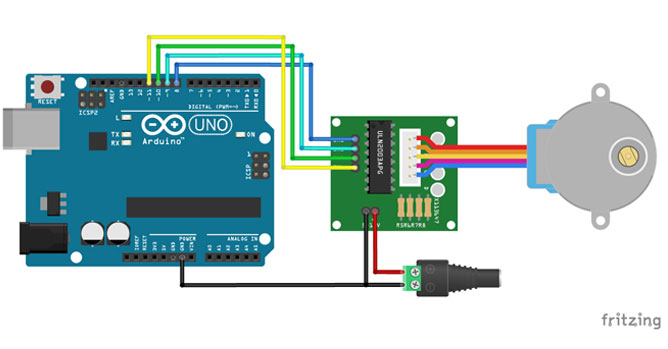
El diagrama de cableado muestra cómo conectar la placa del controlador ULN2003 al motor paso a paso 28BYJ-48 y al Arduino. Las conexiones también se dan en la tabla a continuación.
Código de ejemplo básico de Arduino para controlar un motor paso a paso 28BYJ-48
Puede cargar el siguiente código de ejemplo en su Arduino utilizando el IDE de Arduino.
Este ejemplo usa la biblioteca Stepper.h, que viene preinstalada con el IDE de Arduino. Este scketch gira el motor paso a paso 1 revolución en una dirección, hace una pausa y luego gira 1 revolución en la otra dirección.
#include <Stepper.h>
// Define el número de pasos por rotación:
const int stepsPerRevolution = 2048;
// Conexiones:
// Pin 8 a IN1 en el driver ULN2003
// Pin 9 a IN2 en el driver ULN2003
// Pin 10 a IN3 en el driver ULN2003
// Pin 11 a IN4 en el driver ULN2003
// Crea un objeto paso a paso llamado 'myStepper', tenga en cuenta el orden de los pines:
Stepper myStepper = Stepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
myStepper.setSpeed(5); // Establecer la velocidad a 5 rpm:
Serial.begin(9600); // Comienza la comunicación en serial para debug
}
void loop() {
// revolución en una dirección:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500); // Pausa de 500 mseg
// revolución en sentido inverso:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500); // Pausa de 500 mseg
}
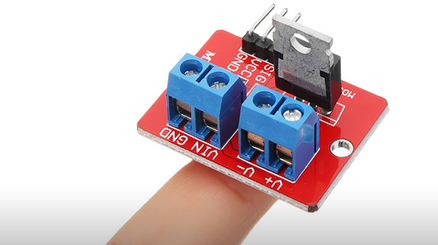
El IRF520N es un modelo muy común de transistor MOSFET que podemos emplear para alimentar cargas a tensión e intensidad superiores a las que podemos proporcionar con las salidas de Arduino.
A los transistores MOSFET se los puede usar del modo "corte y saturación" para formar un interruptor controlado por corriente, con el que controlar grandes cargas.
No todos los MOSFET son apropiados para su uso directamente con una salida de Arduino, dadas sus las limitaciones de tensión y corriente. El IRF520N no es el transistor MOSFET más indicado para emplear con Arduino.
La mayor ventaja del IRF520N es que existen placas comerciales que simplifican significativamente el montaje. Estas placas incluyen resistencias integradas, pines para conectar a Arduino y borneras para conectar la carga.

Incorporar este tipo de placas con IRF520N en proyectos no resulta difícil, solo necesita tener claro que es cada componente y cuál es su función.
Existen dos partes diferenciadas.

En la fase primaria, simplemente conectamos la alimentación Vcc y GND de la placa a los pines 5V y GND de Arduino, respectivamente. Finalmente, conectamos el pin de señal a una salida digital o analógica de Arduino.
En el secundario, conectamos la carga a el borne de conexión indicada. En el otro borne conectamos la fuente de alimentación externa que alimentará la carga, con una tensión máxima de 24V.
Al usar varias fuente de tensión recordar poner siempre en común todos los GND. De lo contrario podríais dañar algún componente.
La conexión, vista desde Arduino, sería la siguiente, donde se ha representado la salida D9, pero podríamos haber elegido cualquier otra salida de Arduino.

Cuando la salida de Arduino se ponga a HIGH, la carga quedará conectada a la fuente de alimentación externa. Arduino solo tendrá que proporcionar la intensidad suficiente para saturar el MOSFET en los cambios de estado.
De esta forma, el IRF520N está comportándose de forma similar a un interruptor que nos permite encender o apagar la carga, y cuyo estado e controlado por la salida de Arduino.
Los códigos de ejemplo son sencillos. Cualquier códigos que utilice salidas digitales o salidas analógicas funcionaran con este montaje.
Por ejemplo, el siguiente código simplemente enciende y apaga la carga en intervalos de 5 segundos.
const int pin = 9;
void setup() {
pinMode(pin, OUTPUT); //definir pin como salida
}
void loop(){
digitalWrite(pin, HIGH); // poner el Pin en HIGH
delay(5000); // esperar un segundo
digitalWrite(pin, LOW); // poner el Pin en LOW
delay(5000); // esperar un segundo
}
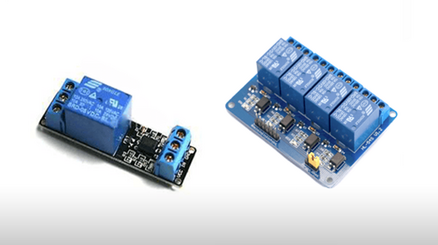
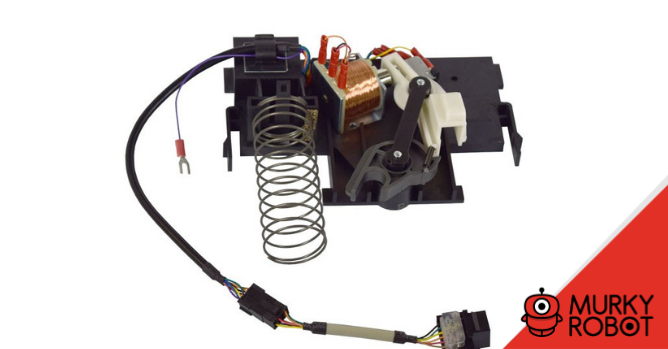
Un relé es un dispositivo electromecánico que permite a un procesador controlar cargas a un nivel tensión o intensidad muy superior a las que su electrónica puede soportar.
Por ejemplo, con una salida por relé podemos encender o apagar cargas de corriente alterna a 220V e intensidades de 10A, lo cual cubre la mayoría de dispositivos domésticos que conectamos en casa a la red eléctrica.
Las salidas por relé son muy frecuentes en el campo de la automatización de procesos, y casi todos los autómatas incluyen salidas por relé para accionar cargas como motores, bombas, climatizadores, iluminación, o cualquier otro tipo de instalación o maquinaria.
Físicamente un relé se comporta como un interruptor "convencional" pero que, en lugar de accionarse manualmente, es activado de forma electrónica. Los relés son aptos para accionar cargas tanto de corriente alterna como continua.
Al ser dispositivos electromecánicos que requieren el movimiento de componentes interno para su funcionamiento el tiempo de conmutación de un relé es elevado, del orden de 10ms.
Como consecuencia los relés no pueden usarse con una señal PWM, ni otro tipo de señales de frecuencia media-alta. En caso de tener está necesidad deberéis usar otro dispositivo, como un transistor BJT, un MOSFET o relés de estado sólido, en función de las características de vuestro proyecto.
La vida útil del dispositivo está determinada por el número de conmutaciones. Sin embargo, típicamente es del orden de 100.000 a 1.000.000 de conmutaciones por lo que en un uso normal son componentes duraderos y fiables.
El circuito primario de un relé, que recibe la señal de la electrónica de baja tensión, está formado por una bobina arrollada a un núcleo metálico, formando un electroiman.
El circuito secundario, encargado de alimentar la carga, está formado por unos contactos eléctricos instalados en láminas de metal flexible.
Todos los elementos están fijados a una base aislante y rodeados de una envolvente, que impiden que exista el contacto eléctrico entre los distintos terminales o con el exterior.
De estos contactos uno o dos son contactos fijos, mientras que el restante es un contacto móvil encargado de cerrar el circuito con uno de los contactos fijos.
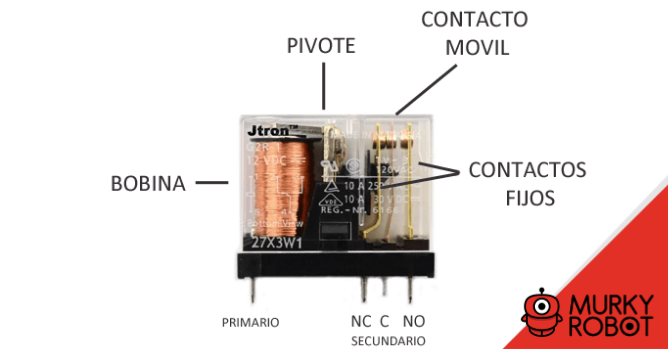
Los relés normalmente disponen de tres contactos en el secundario C (común), NO (normalmente abierto) y NC (normalmente cerrado). Pero también encontramos modelos que prescinden del terminal NC.
En caso de usar una placa comercial el montaje es realmente sencillo. En primer lugar alimentamos la electrónica del módulo Vcc y GND a Vcc y GND de Arduino mediante los terminales existentes.
Por otro lado conectamos la carga a la bornera de tres conexiones. Siempre debemos conectar uno de los polos de la carga al terminal C, que habitualmente es el terminal del medio.
El otro polo de la carga lo conectaremos al terminal NO o NC, dependiendo de si cuando el relé este desactivado queremos que el secundario este abierto (NO), o cerrado (NC).
Finalmente conectamos el pin de señal a una salida digital de Arduino. Si empleamos una placa con varios canales, conectaríamos cada uno de los canales directamente a una salida digital.

El código para controlar un relé es sencillo, y solo necesitamos controlar cualquier salida digital tal, la cual esta conectada al modulo.
Por ejemplo, el siguiente código simplemente enciende y apaga la carga en intervalos de 10 segundos.
const int pin = 9;
void setup() {
Serial.begin(9600); //iniciar puerto serie
pinMode(pin, OUTPUT); //definir pin como salida
}
void loop(){
digitalWrite(pin, HIGH); // poner el Pin en HIGH
delay(10000); // esperar un segundo
digitalWrite(pin, LOW); // poner el Pin en LOW
delay(10000); // esperar un segundo
}
El objetivo de esta guía es listar de forma sencilla cómo funcionan cada actuador lineal con sus ventajas y desventajas.
En otra guía hemos visto los tipos de motores rotativos que que tenemos disponibles, con sus ventajas y desventajas.
Un electroimán es un dispositivo que permite atraer objetos ferromagnéticos, como el Hierro (Fe) y algunas de sus aleaciones.
Un electroimán está formado por una bobina arrollada en torno a un núcleo ferromagnético. Al aplicar una corriente a la bobina se genera un campo magnético en su interior, que genera una fuerza de atracción o repulsión sobre otros materiales.

El núcleo ferromagnético del electroimán aumenta la potencia del campo magnético, y reduce las pérdidas por dispersión.
Podemos usar un electroimán en nuestros proyectos para crear una pequeña grúa, o instalado en un brazo robótico para levantar objetos, o incluso para fijar un robot a una plancha metálica.

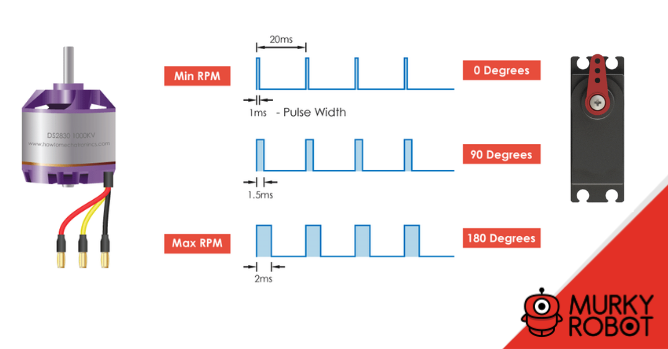
Los motores sin escobillas funcionan debido a un campo magnético generado en su interior, el cual se crea a partir de sus 3 bobinas que para ser excitadas, se tiene que dar con el ancho de pulso exacto en cada una para lograr un giro completo.
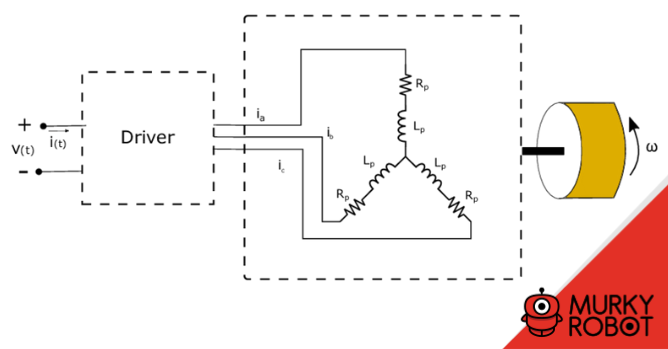
Para controlar un motor de este tipo Arduino envía información al ESC (control electrónico de velocidad) quien se encarga de enviar los pulsos de excitación a cada una de las bobinas.
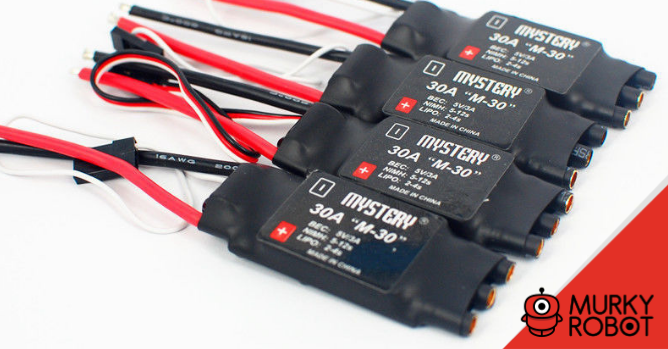
El ESC utiliza señales como si quisiéramos controlar un servo normal. Estas señales son cuadradas con un tiempo en alto que varían entre 1 y 2 milisegundos, que correspondería a un ángulo de entre 0 y 180 grados.
Estas señales son cuadradas con un tiempo en alto que varían entre 1 y 2 milisegundos, que correspondería a un ángulo de entre 0 y 180 grados.
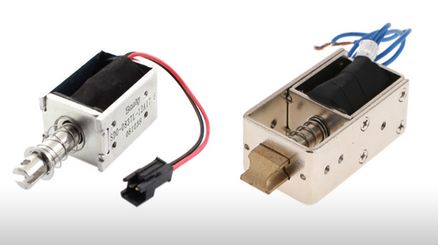
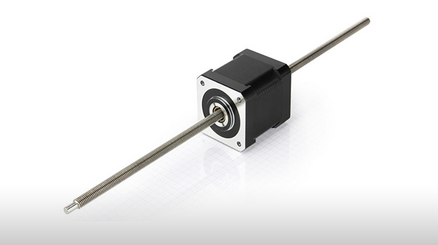
Un Solenoides ó "Actuador Electromagnético" es un dispositivo capaz de generar movimiento lineal directamente, sin necesidad de emplear mecanismos o engranajes.
Un Solenoides está constituido por una bobina junto con un perno central (ferro magnético) siendo ambos elementos independientes entre sí.
Cuando se le da energía a la bobina, esta genera un campo magnético que atrae al perno central provocando su desplazamiento.
Habitualmente se dispone de un resorte entre el cuerpo de la bobina y el perno central, de forma que este vuelve a su posición original al cesar la corriente.
La tensión de alimentación dependerá del tamaño del actuador, siendo populares en: 5V, 12V y 24V.
El consumo varía desde 100mA para los Solenoides más pequeños, hasta 1-2A en modelos más grandes.
Los Solenoides tienen la ventaja de realizar movimientos rápidos y ser muy sencillos de manejar y mantener, ya que carecen de partes móviles (más allá del propio perno central).
Por el contrario, el alcance es limitado típicamente en el rango de unos pocos milímetros (4-60 mm según modelos). La fuerza que pueden ejercer va desde los gramos-fuerza, hasta los modelos más grandes capaces de ejercer unos pocos kilogramos-fuerza
La fuerza ejercida por el Solenoides no es lineal, es decir, el Solenoides ejerce menos fuerza cuando el perno central está extendido, que cuando el perno central está cerca de su posición final.
Otra desventaja es que, por supuesto, no se dispone de ningún tipo de control sobre la velocidad o la posición del perno. Simplemente podemos tirar o empujar una carga.
Por sus características son empleados en "cerraduras electrónicas", "puertas de seguridad", "válvulas electrónicas".
Los motores de corriente continua (motores DC) son unos de los actuadores más comunes. Su funcionamiento se basa en el alineamiento de dos campos magnéticos.
Los motores de corriente continua se encuentran disponibles en distintas tensiones nominales, siendo habituales 6V, 12V y 24V. En cuanto a potencia, encontramos motores de todo tipo de tamaños, desde apenas unos milímetros de largo hasta

Los motores tienen altas velocidades de giro y bajo bajo par. Podemos emplear las salidas PWM de Arduino para controlar la velocidad, pero esto mantendrá el par máximo disponible. Otra opción es emplear un reductor externo o integrado (Motores con Reductor) que reduce la velocidad a la vez que aumenta el par y la precisión.
Los motores DC tienen mal control de posición y mal control de la velocidad. Su comportamiento es fuertemente no lineal y depende mucho de la carga que soportan. Por este motivo suelen emplearse con un encoder que permite saber la posición del eje. Incluso algunos modelos de motores DC integran un encoder internamente.

Los Servomotores por su facilidad de uso son ampliamente empleados en proyectos de robótica, como brazos robóticos, robots con patas, controlar el giro de torretas, u orientar sensores como sensores de ultrasonidos o sensores de temperatura a distancia.
Un servo es un tipo de accionador ampliamente empleado en electrónica. A diferencia de otros tipos de motores en los que controlamos la velocidad de giro, en un servo indicamos directamente el ángulo deseado y el servo se encarga de posicionares en este ángulo.
Típicamente los servos disponen de un rango de movimiento de entre 0 a 180º. Es decir, no son capaces de dar la vuelta por completo (de hecho disponen de topes internos que limitan el rango de movimiento)
Internamente un servo frecuentemente consta de un mecanismo reductor. Por tanto proporcionan un alto par y un alto grado de precisión (incluso décimas de grado). Por contra, las velocidades de giro son pequeñas frente a los motores de corriente continua.
Los servos se admiten una tensión de alimentación entre 4,8V a 7,2V, siendo el valor más adecuado es 6V. Con tensiones inferiores el motor tiene menos fuerza y velocidad. Con tensiones superiores a 6,5V los servos empiezan a oscilar demasiado, lo cual los hace poco útiles.
Internamente un servo está constituido por un motor de corriente continua, acoplado a un reductor para reducir la velocidad de giro, junto con la electrónica necesaria para controlar su posición.

Frecuentemente simplemente se dispone de un potenciómetro unido al eje del servo, que permite al servo para conocer la posición del eje. Esta información es tratada por un controlador integrado que se encarga de ajustar actuar sobre el motor para alcanzar la posición deseada.
La comunicación de la posición deseada se realiza mediante la transmisión de un señal pulsada con periodo de 20ms. El ancho del pulso determina la posición del servo.

La relación entre el ancho del pulso y el ángulo depende del modelo del motor.
Por ejemplo, algunos modelos responden con 0º a un pulso de 500 ms, y otros a un pulso de 1000 ms
En general, en todos los modelos:
Por tanto, variando la señal en microsegundos podemos disponer de una precisión teórica de 0.18-0.36º.














Copyright © 2026 - Murky Robot - Todos los derechos reservados